Роботы


29 Апреля 2025
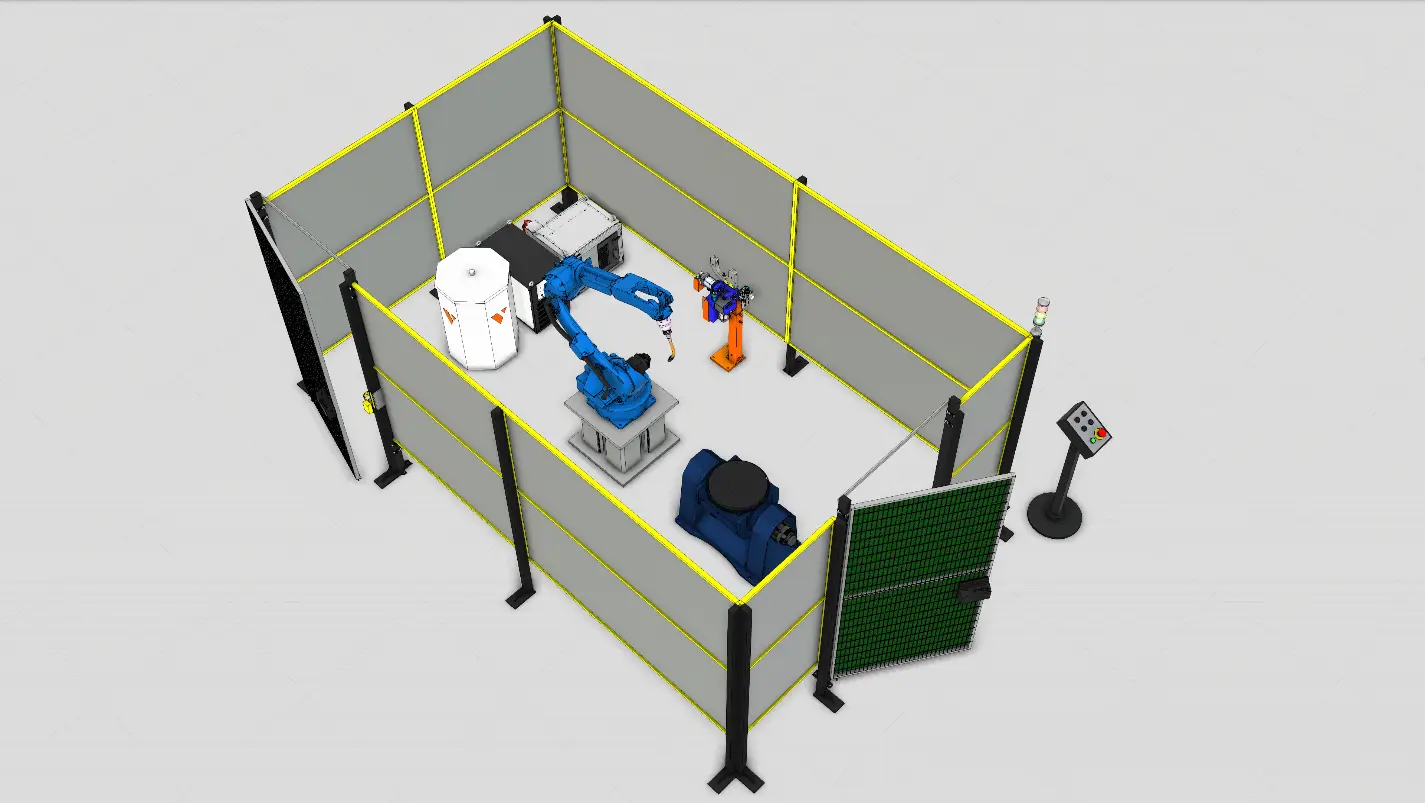
Роботизированный комплекс загрузки-разгрузки
Комплекс предназначен для автоматической загрузки и выгрузки заготовок при механообработке на станках с ЧПУ.
Загрузка заготовок → Роботизированное перемещение → Установка в станок → Выгрузка готовых деталей → Возврат в накопитель → Повтор цикла
Промышленный робот-манипулятор
Шестиосевой промышленный робот предназначен для высокоскоростных операций загрузки и выгрузки деталей. Конструкция ориентирована на стабильную работу в условиях механообработки.
Основные характеристики
- Количество осей: 6
- Полезная нагрузка: до 25 кг
- Радиус действия: до 1800 мм
- Повторяемость: до ±0,03 мм
- Степень защиты запястья: IP67
- Температурный диапазон: 0…+45 °C
Робот обеспечивает короткое время цикла и устойчивую траекторию при работе с заготовками средней массы.
Контроллер управления
Контроллер выполняет координацию движений робота и периферийного оборудования.
Функциональные возможности
- управление внешними осями и позиционерами
- интеграция с оборудованием ЧПУ
- встроенный мягкий ПЛК
- поддержка сетевых протоколов промышленной автоматизации
- удалённый мониторинг и диагностика
Программирование выполняется через обучающий пульт с сенсорным дисплеем и логикой пошагового задания операций.
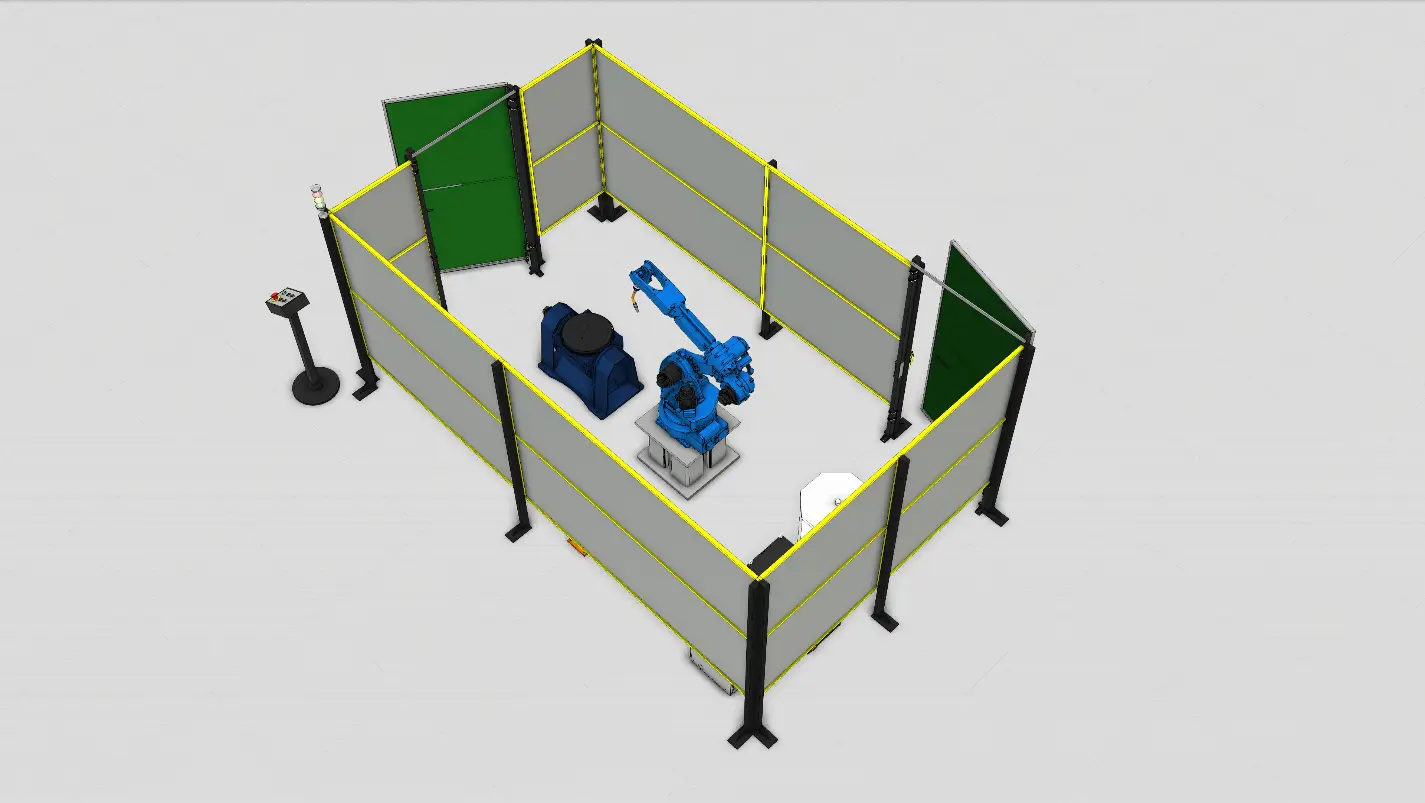
Поворотный стол
Двухпозиционный поворотный стол используется для разделения зоны оператора и зоны работы робота.
Характеристики

- Количество позиций: 2
- Номинальная нагрузка: до 400 кг
- Угол поворота: 180°
- Тип привода: сервопривод
Поворот осуществляется только после подтверждения безопасного состояния зоны.
Пневматический захват
Захват предназначен для надёжного удержания заготовок в процессе транспортировки и установки в станок.
Особенности
- центрирующее или параллельное исполнение
- высокая повторяемость позиционирования
- возможность работы в загрязнённой среде
- адаптация под форму детали
Конструкция захвата допускает установку сменных кулачков под конкретный тип заготовки.
Накопитель заготовок
Накопитель используется для хранения заготовок и готовых деталей.
Функции
- поштучная подача деталей роботу
- фиксация положения заготовки
- логическое разделение «сырых» и готовых деталей
Конфигурация накопителя подбирается под геометрию деталей и требования технологического процесса.
Описание технологического процесса
Оператор размещает заготовки в накопитель и подтверждает готовность цикла.
Далее система работает автоматически:
- робот забирает заготовку из накопителя
- устанавливает деталь в рабочую зону станка
- после завершения обработки извлекает готовую деталь
- размещает изделие в отдельную зону накопителя
- переходит к следующей заготовке
Разделение зон исключает нахождение оператора в рабочей зоне робота.
Комплектация
- промышленный робот-манипулятор
- контроллер управления и пульт оператора
- поворотный стол
- пневматический захват
- накопитель заготовок
- система безопасности
- ограждения
- шкафы управления
- интеграция оборудования в единый комплекс
- пусконаладочные работы
- обучение персонала