Новости и события


06 Сентября 2023
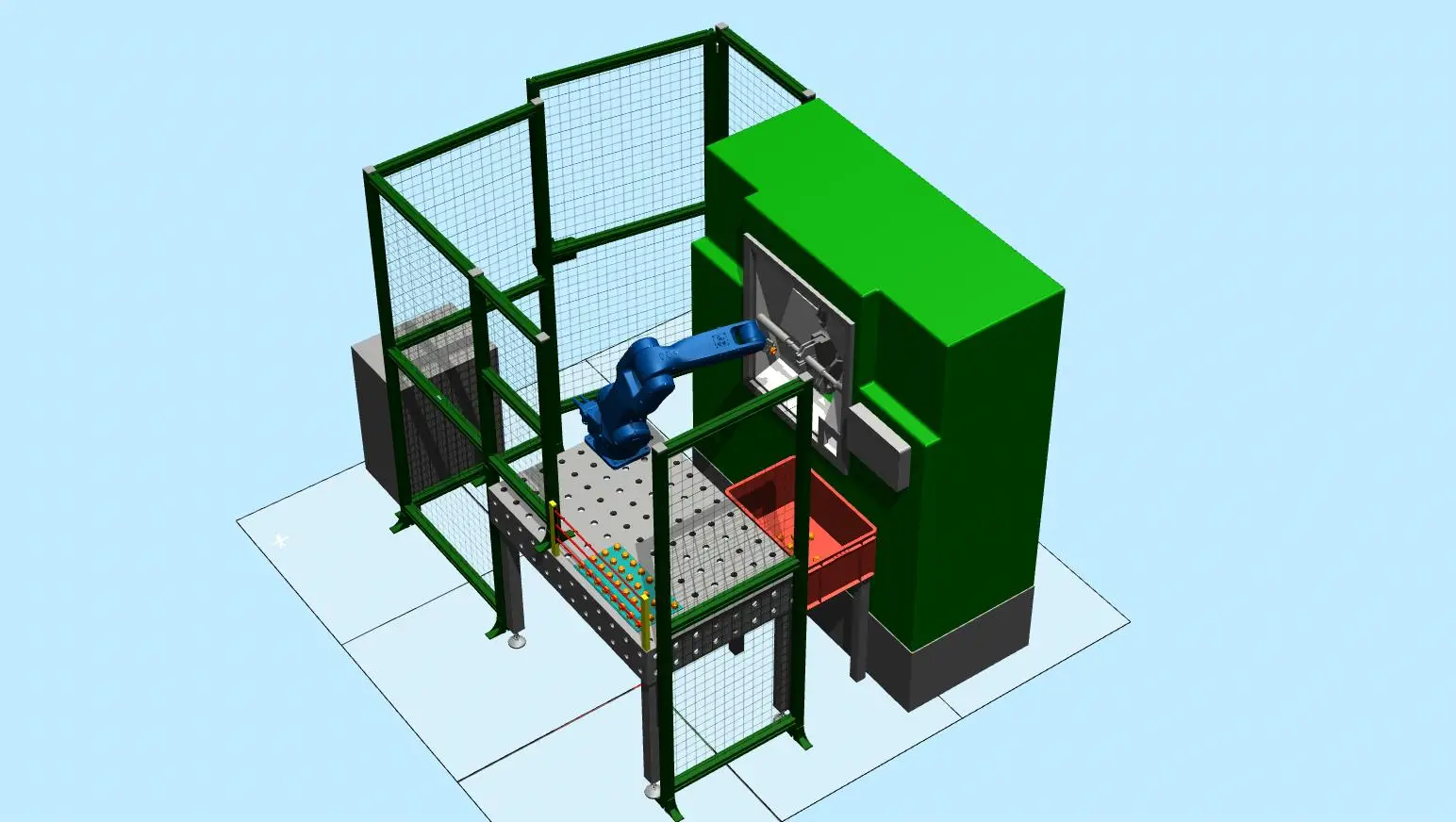
Роботизированный комплекс загрузки-разгрузки
Комплекс для автоматизированной загрузки заготовок в станок: робот установлен рядом со станком на специальном столе, оператор меняет накопитель с заготовками, после окончания заготовок робот возвращается в «дом» и ждёт замены накопителя.
Накопитель → Захват → Загрузка в станок → Возврат в «дом» → Замена накопителя
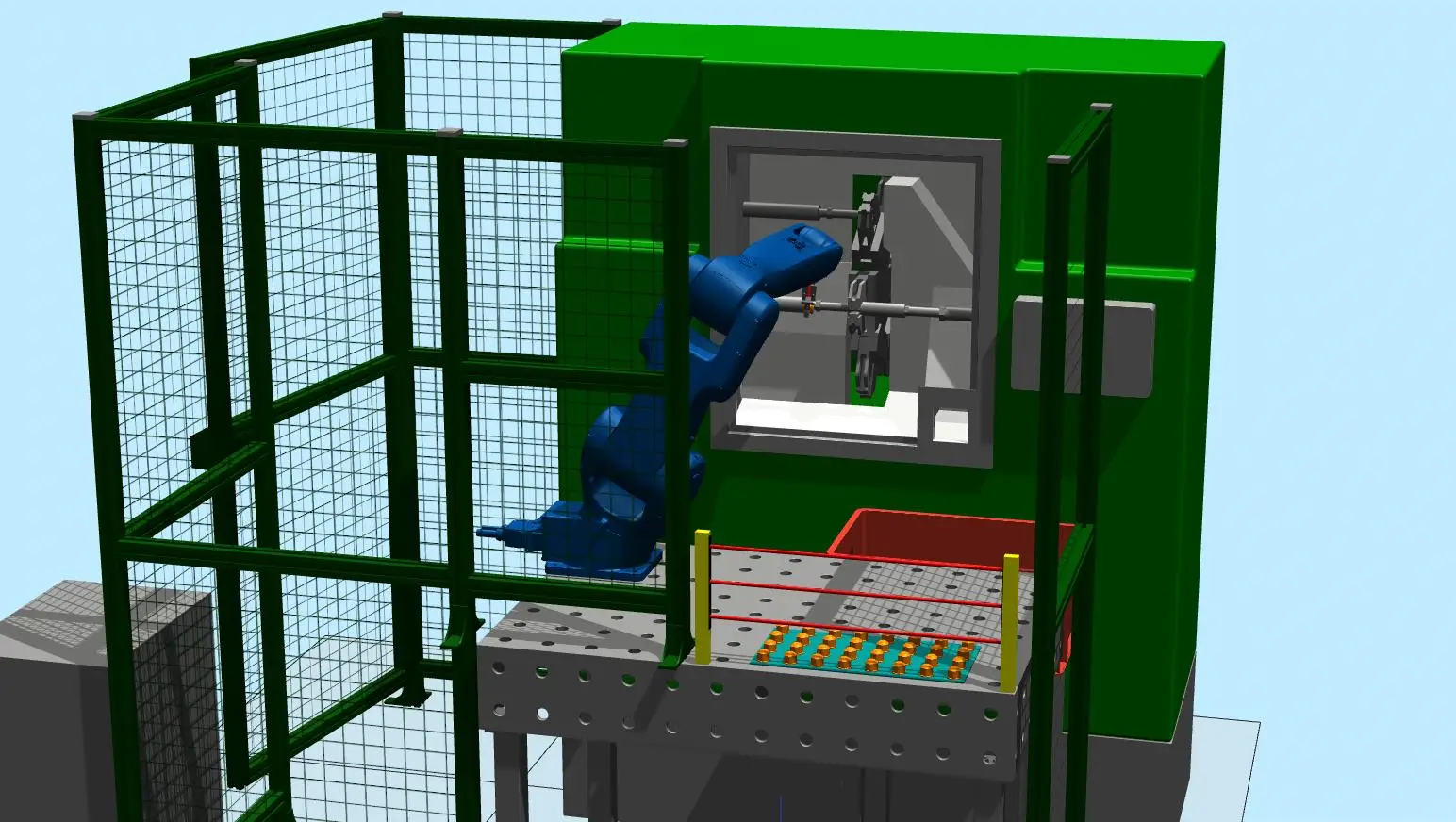
Промышленный робот-манипулятор CRP-RA09A-07
Компактный 6-осевой робот с рабочей зоной до 916 мм и высокой повторяемостью ±0,03 мм. Узкое «тело» удобно для работы в ограниченном пространстве, внутренняя прокладка проводов и герметичный корпус повышают стойкость к производственным условиям.
Технические характеристики
- Форма руки: вертикальный узловой шарнир
- Количество осей: 6
- Максимальная нагрузка: 7 кг
- Точность повторного позиционирования: ±0,03 мм
- Максимальная досягаемость: 916 мм
- Масса робота: 46 кг
- Способ крепления: пол / потолок / под углом
- Температура эксплуатации: 0…45 °C
- Относительная влажность: 20…85% (без конденсата)
- Вибрации: < 0,5 G
Диапазоны движения по осям
- Ось 1: −170…+170°
- Ось 2: −42…+120°
- Ось 3: −62…+180°
- Ось 4: −185…+185°
- Ось 5: −120…+125°
- Ось 6: −360…+360°
Максимальные скорости по осям
- Ось 1: 255 °/сек
- Ось 2: 290 °/сек
- Ось 3: 330 °/сек
- Ось 4: 490 °/сек
- Ось 5: 410 °/сек
- Ось 6: 680 °/сек
Допустимые нагрузки на запястье
- Допустимый крутящий момент ось 4: 16,2 Н·м
- Допустимый крутящий момент ось 5: 16,2 Н·м
- Допустимый крутящий момент ось 6: 9,5 Н·м
- Допустимый инерционный момент ось 4: 0,38 кг/м²
- Допустимый инерционный момент ось 5: 0,38 кг/м²
- Допустимый инерционный момент ось 6: 0,16 кг/м²
Захват
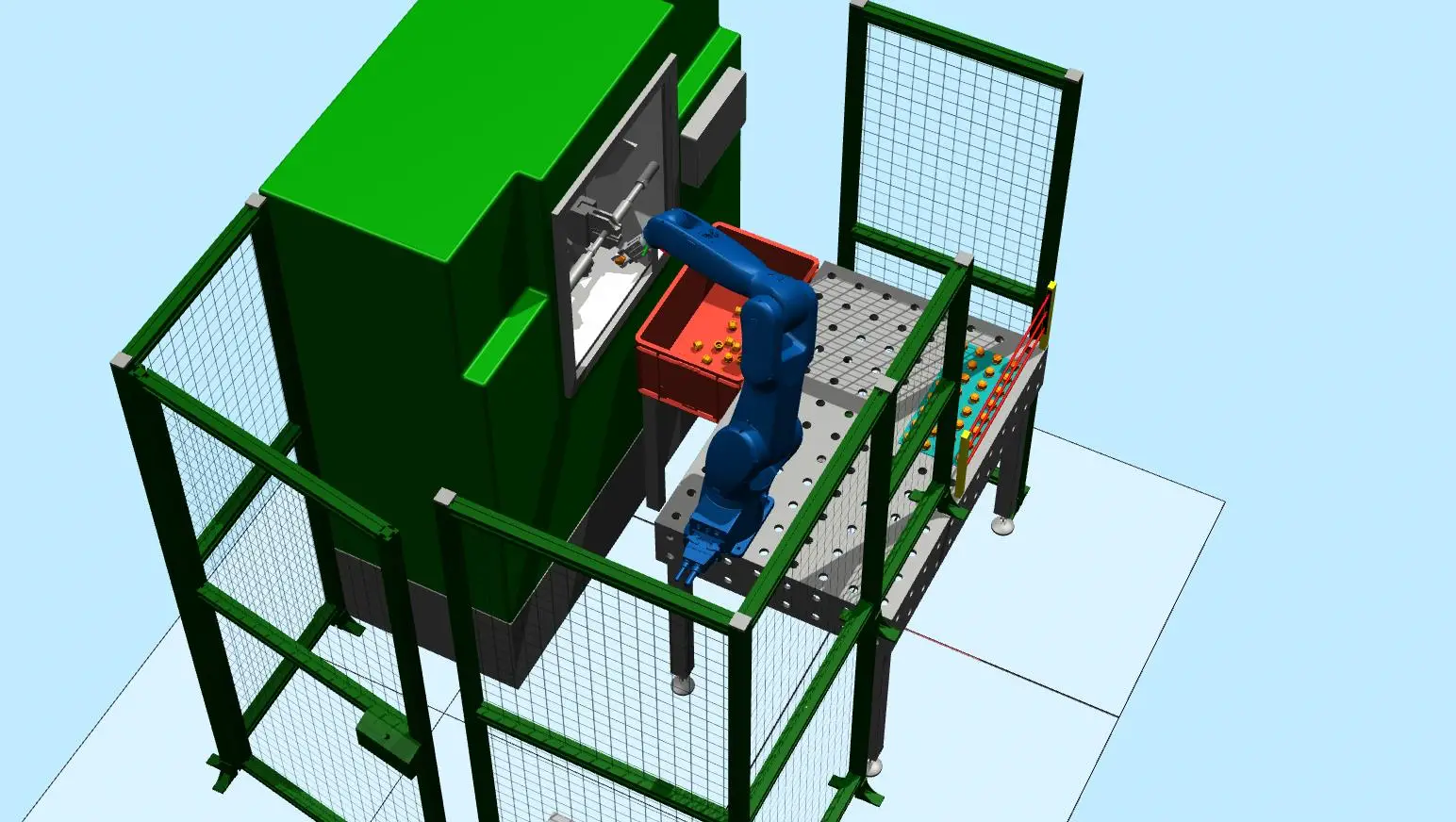
Двухкулачковый пневмомеханический параллельный захват для работы от пневмолинии. Кулачки могут быть адаптированы под геометрию изделия; заявлена работа с заготовками массой до 10 кг.
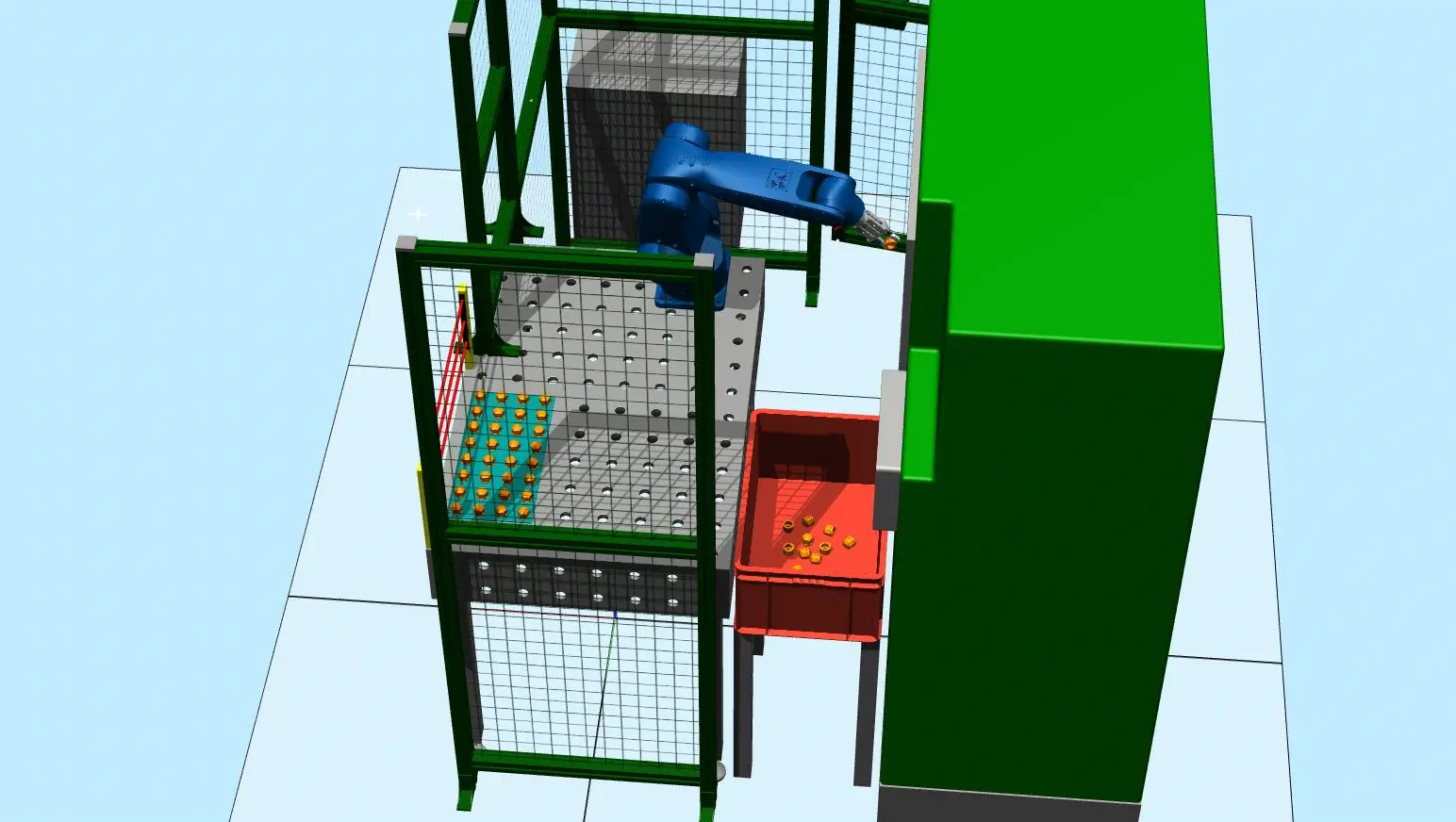
Стол и накопитель
Робот монтируется на стол рядом со станком. Оператор приносит накопитель с изделиями и устанавливает его в подготовленное место на столе.
Подключение к станку
Выполняется подключение комплекса к станку для обмена сигналами и согласования циклов (логика «готов/занят», разрешения, подтверждения операций).
Система безопасности
Комплекс предусматривает систему безопасности для исключения доступа в опасную зону и корректной остановки оборудования.
Описание технологического процесса
Робот устанавливается рядом со станком на специальный стол. Оператор приносит накопитель с изделиями и устанавливает его на стол. Робот забирает заготовки из накопителя и загружает в станок. По окончании заготовок робот возвращается в домашнее положение и ожидает смены накопителя на полный.
Цены и комплектация
- Комплекс загрузки-разгрузки (CRP-RA09A-07, контроллер, захват, стол, подключение к станку, безопасность, интеграция) — 3 536 071 руб. (включая НДС 22%)
- Промышленный робот CRP-RA09A-07; контроллер G4; пульт управления
- Захват, включая шкаф управления пневматикой и периферию
- Стол для установки робота и накопитель
- Подключение к станку
- Система безопасности
- Интеграция оборудования в единый комплекс (микроконтроллеры, ПО, блоки управления, кабели, шланги, разъёмы, кронштейны), ПНР, обучение персонала
Общая стоимость комплекса: 3 536 071 руб. (включая НДС 22%)