Роботы


20 Июля 2023
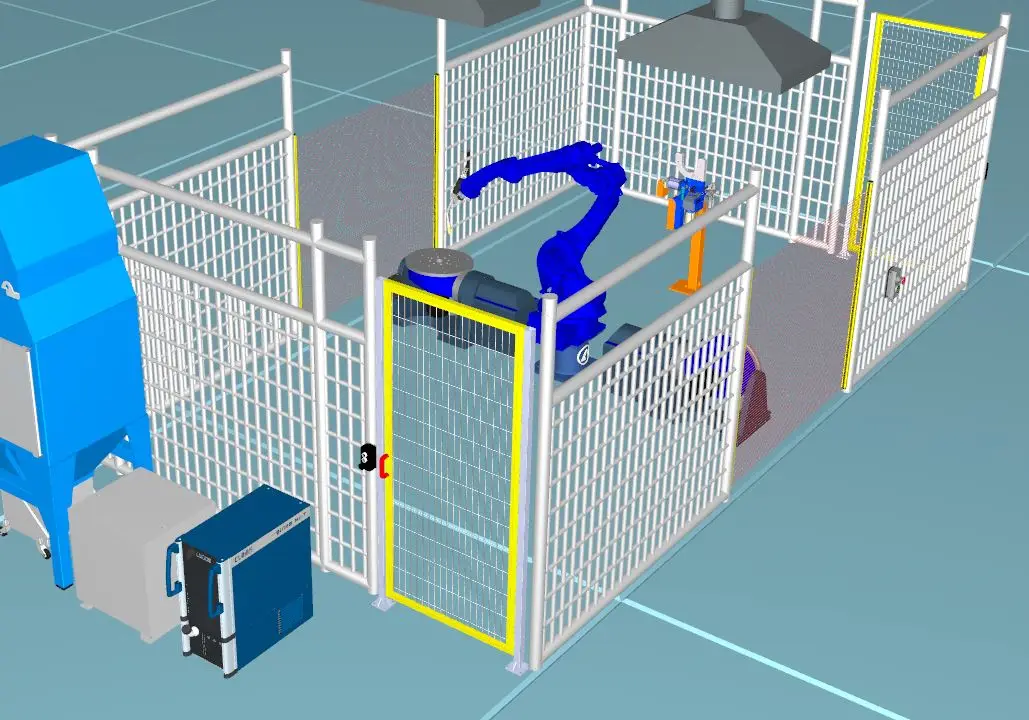
Роботизированный комплекс автоматизации механообработки
Комплекс предназначен для автоматизации операций загрузки, выгрузки и перемещения деталей при работе на оборудовании с ЧПУ.
Подача заготовок → Захват → Установка в станок → Обработка → Выгрузка готового изделия → Повтор цикла
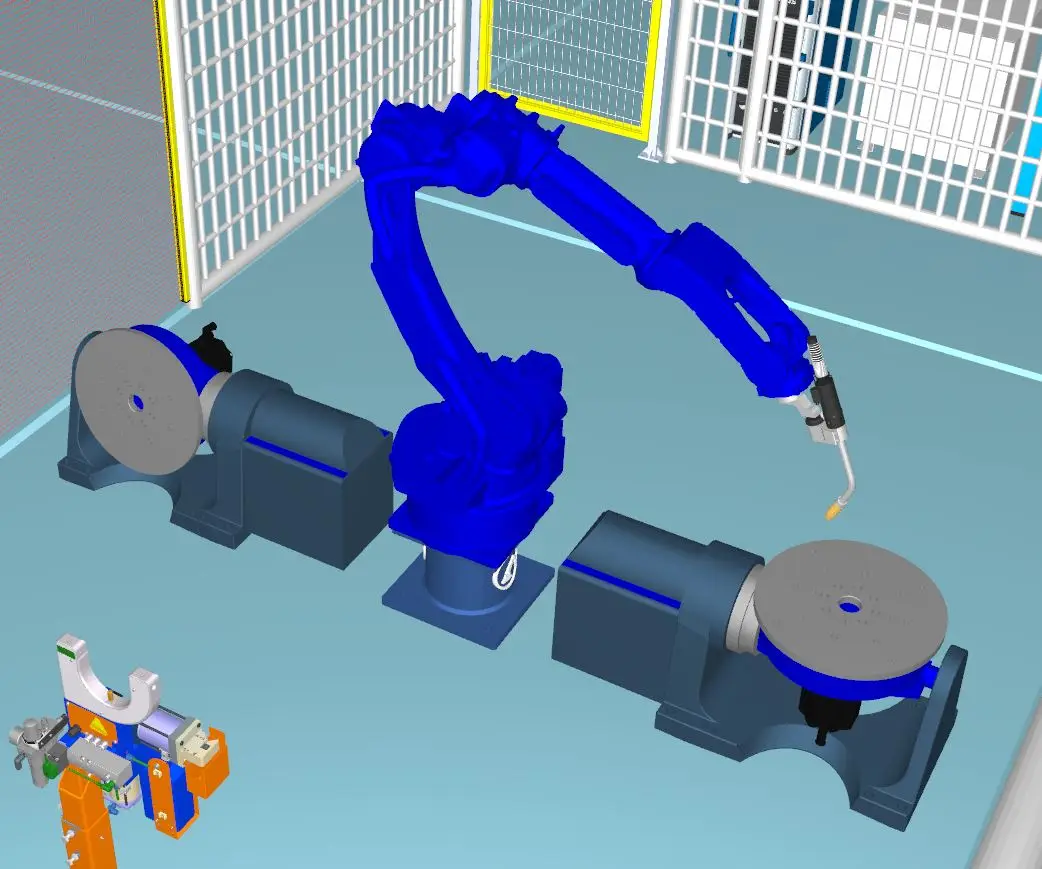
Промышленный робот-манипулятор
Шестиосевой промышленный робот применяется для обслуживания металлорежущего оборудования и выполнения повторяющихся операций с высокой стабильностью траектории.
Основные характеристики
- Количество осей: 6
- Полезная нагрузка: до 20–25 кг
- Радиус действия: до 1800–2000 мм
- Повторяемость: до ±0,03 мм
- Степень защиты запястья: IP67
- Температурный диапазон: 0…+45 °C
Робот рассчитан на непрерывную эксплуатацию в производственных условиях.
Контроллер управления
Контроллер выполняет управление движением робота и логикой технологического процесса.
Функциональные возможности
- управление программами обработки
- синхронизация с оборудованием ЧПУ
- подключение периферийных устройств
- мониторинг состояния системы
- интеграция с системой безопасности
Программирование осуществляется через промышленный обучающий пульт.
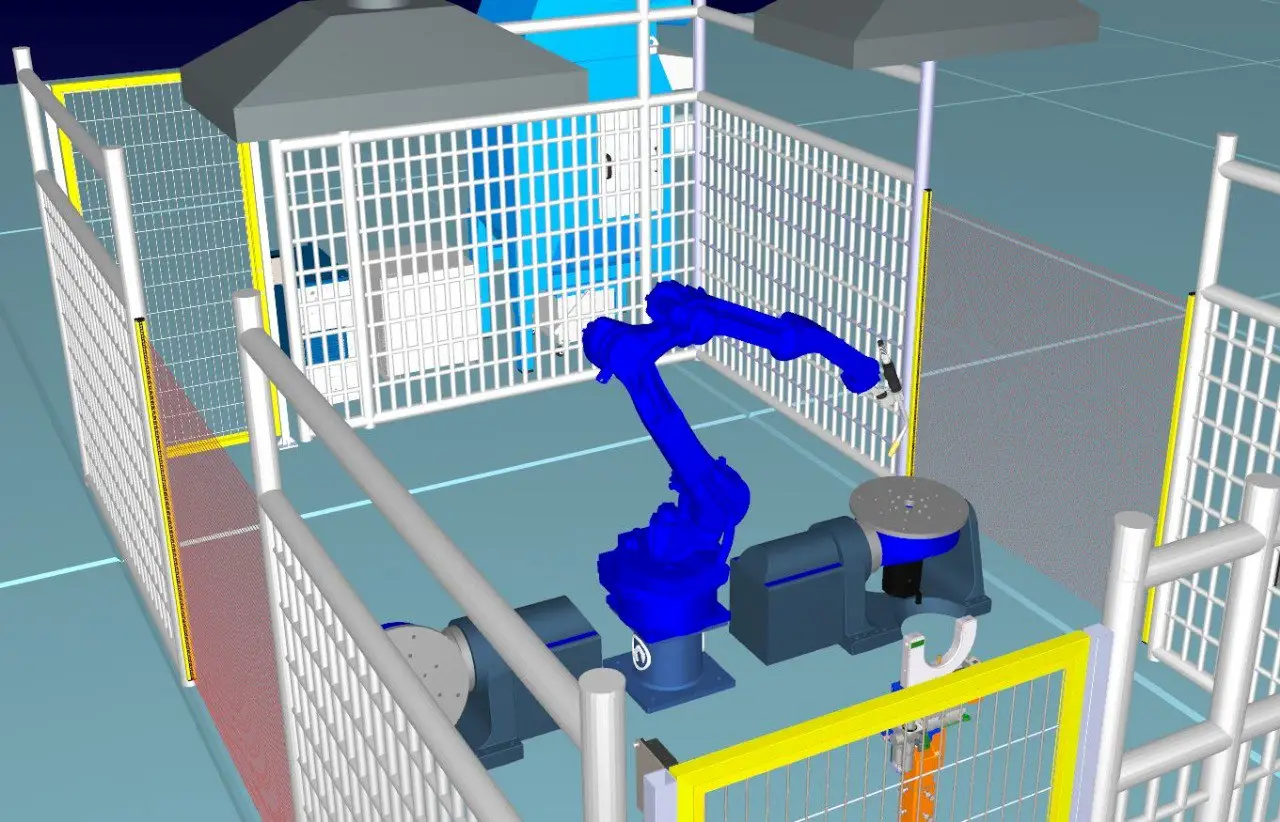
Позиционирующее оборудование
Для организации зоны загрузки и выгрузки используется позиционирующее или поворотное устройство.
Назначение
- ориентация заготовок в рабочей зоне
- разделение зоны оператора и зоны робота
- сокращение времени производственного цикла
Все перемещения выполняются только при подтверждённой безопасности зоны.
Захватное устройство
Захват предназначен для надёжного удержания деталей различной геометрии.
Особенности
- пневматическое исполнение
- сменные кулачки
- устойчивость к загрязнённой среде
- стабильное позиционирование
Конструкция захвата адаптируется под параметры заготовок.
Накопитель заготовок
Накопитель применяется для размещения заготовок и готовых изделий.
Функции
- упорядоченное хранение деталей
- автоматическая подача роботу
- разделение входного и выходного потока
Конфигурация накопителя формируется под технологический процесс.
Описание технологического процесса
Оператор размещает заготовки в накопитель и подтверждает запуск цикла.
После запуска комплекс функционирует автоматически:
- робот захватывает заготовку
- устанавливает её в рабочую зону станка
- после завершения обработки извлекает деталь
- размещает готовое изделие в накопителе
- переходит к следующей заготовке
Зоны оператора и робота полностью разделены.
Комплектация
- промышленный робот-манипулятор
- контроллер управления и пульт оператора
- позиционирующее оборудование
- захватное устройство
- накопитель заготовок
- система безопасности
- защитные ограждения
- шкафы управления
- интеграция оборудования в единый комплекс
- пусконаладочные работы
- обучение персонала