Сварка
- Главная
/ Сварка

30 Марта 2024
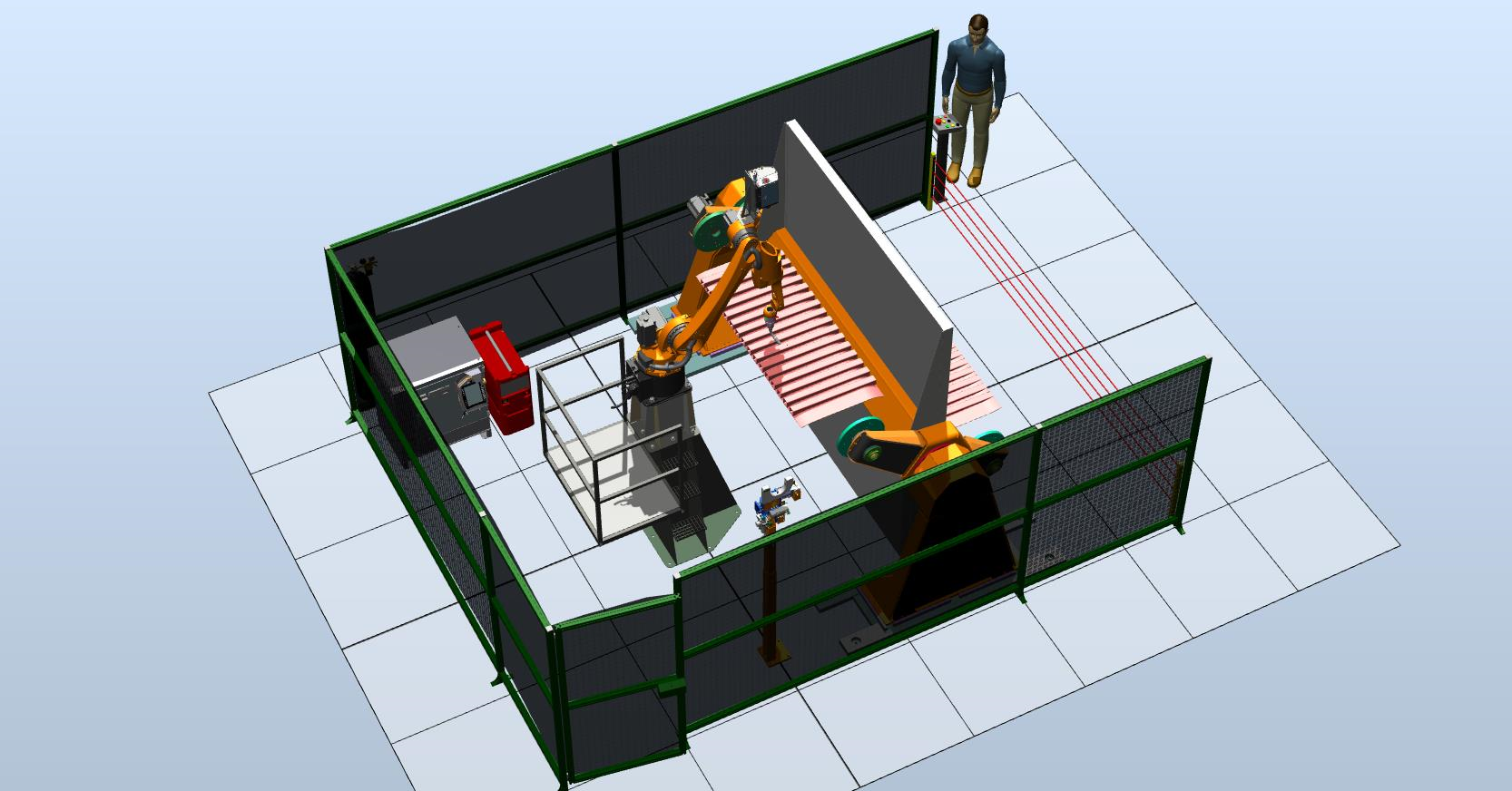
Роботизированный комплекс автоматизации механообработки
Роботизированный комплекс автоматизации технологического участка
Комплекс предназначен для автоматизации операций загрузки, выгрузки и перемещения деталей при механообработке и вспомогательных производственных процессах.
Подача заготовок → Захват → Перемещение роботом → Установка в рабочую позицию → Обработка → Выгрузка готового изделия → Повтор цикла
Промышленный робот-манипулятор
Шестиосевой промышленный робот используется для стабильной работы в условиях серийного и мелкосерийного производства.
Основные характеристики
- Количество осей: 6
- Полезная нагрузка: до 20–35 кг
- Радиус действия: до 2000–2500 мм
- Повторяемость: до ±0,05 мм
- Степень защиты запястья: IP67
- Температурный диапазон: 0…+45 °C
Робот обеспечивает высокую точность и устойчивость траектории при повторяющихся операциях.
Контроллер управления
Контроллер обеспечивает управление движением робота и логикой производственного цикла.
Функциональные возможности
- управление программами обработки
- синхронизация с оборудованием ЧПУ
- подключение периферийных устройств
- мониторинг состояния системы
- интеграция с системой безопасности
Программирование выполняется через промышленный обучающий пульт.
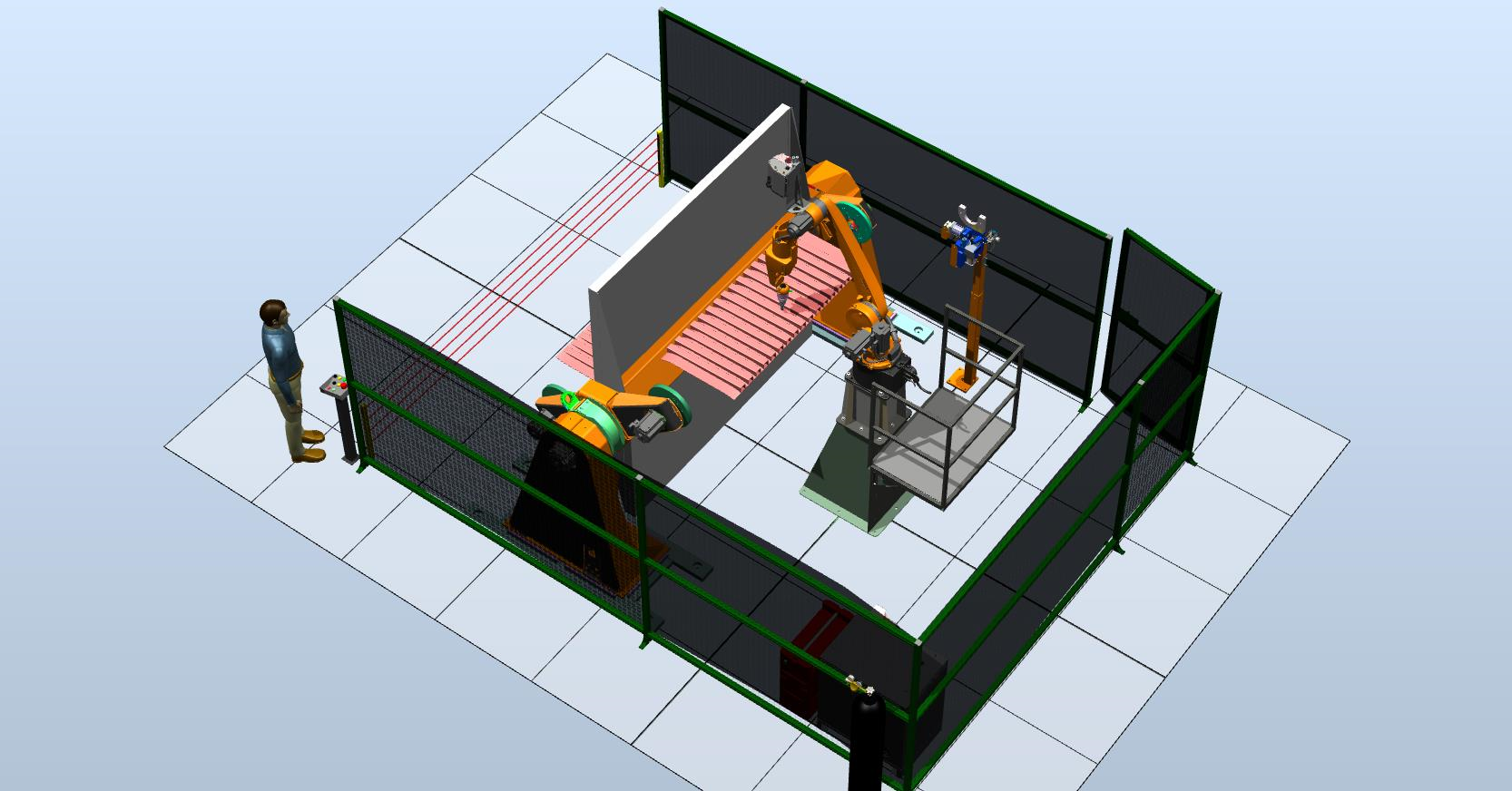
Позиционирующее оборудование
Для оптимизации производственного процесса применяется позиционирующее устройство.
Назначение
- ориентация деталей в рабочей зоне
- сокращение времени цикла
- повышение безопасности оператора
Перемещения выполняются только при подтверждённом безопасном состоянии зоны.
Захватное устройство
Захват используется для удержания и транспортировки заготовок различной геометрии.
Особенности
- пневматическое исполнение
- сменные кулачки
- устойчивость к загрязнениям
- стабильное позиционирование
Тип захвата подбирается под параметры деталей.
Накопитель заготовок
Накопитель применяется для временного хранения заготовок и готовых изделий.
Функции
- организация потока деталей
- автоматическая подача роботу
- разделение входных и выходных изделий
Конструкция накопителя формируется под конкретный технологический процесс.
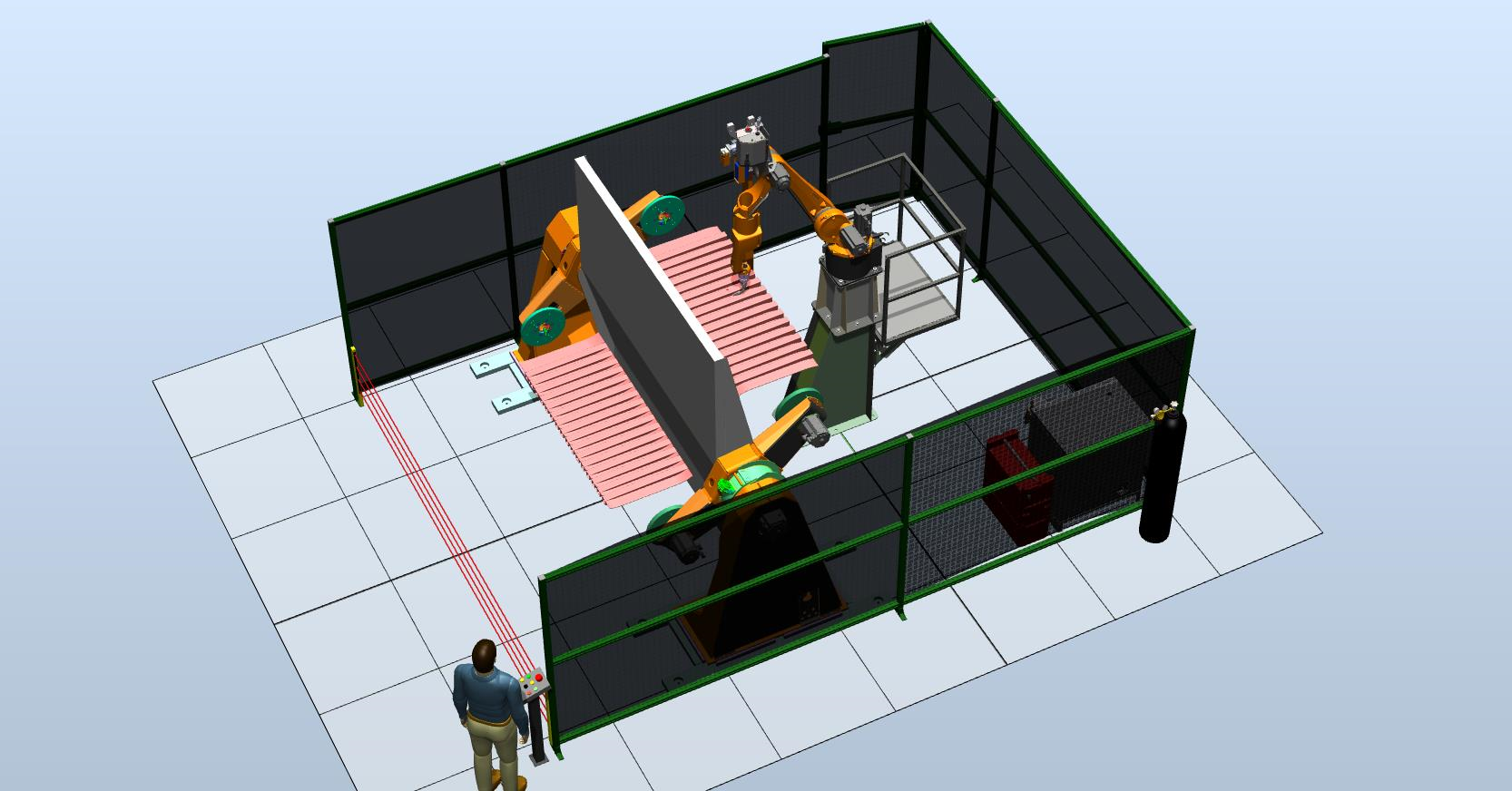
Описание технологического процесса
Оператор размещает заготовки в накопитель и подтверждает запуск цикла.
После запуска система работает автоматически:
- робот захватывает заготовку
- устанавливает её в рабочую зону
- после завершения обработки извлекает деталь
- размещает готовое изделие в накопителе
- переходит к следующей заготовке
Рабочие зоны оператора и робота полностью разделены.
Комплектация
- промышленный робот-манипулятор - контроллер управления и пульт оператора
- позиционирующее оборудование - захватное устройство - накопитель заготовок - система безопасности - защитные ограждения - шкафы управления - интеграция оборудования в единый комплекс - пусконаладочные работы - обучение персонала