Сварка
- Главная
/ Сварка

26 Марта 2025
Роботизированный комплекс обслуживания вентиляционных узлов
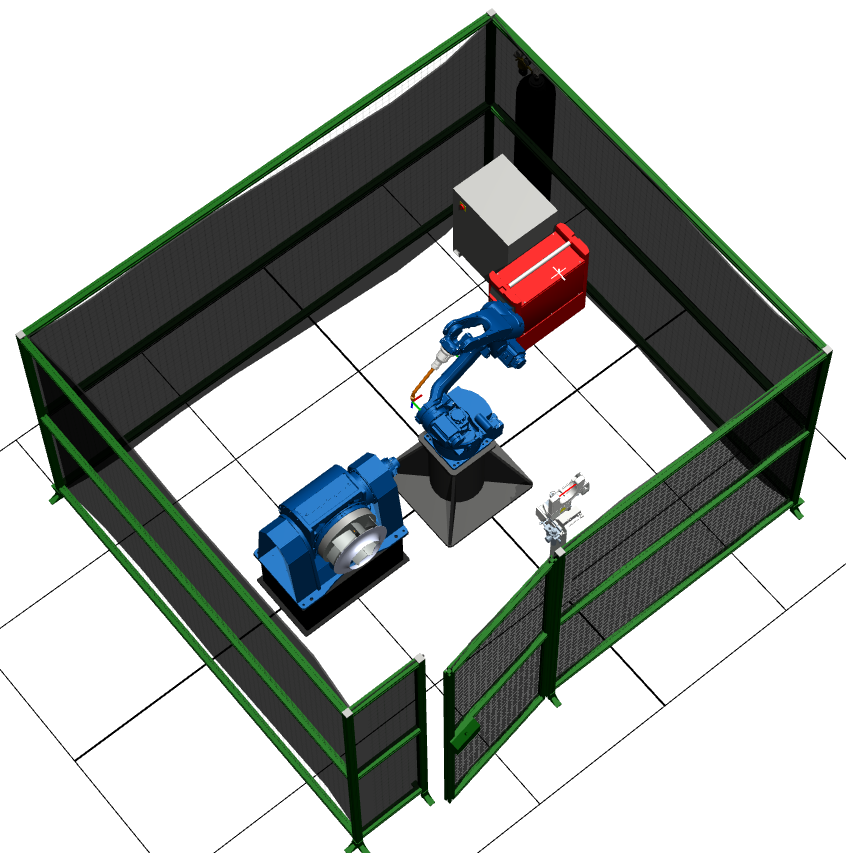
Комплекс предназначен для автоматизации операций перемещения, установки и съёма деталей при сборке и механообработке вентиляционных компонентов.
Подача заготовок → Захват детали → Перемещение роботом → Установка в рабочую позицию → Возврат готового изделия → Повтор цикла
Промышленный робот-манипулятор
Шестиосевой промышленный робот используется для работы с деталями среднего веса и обеспечивает стабильную траекторию при повторяющихся операциях.
Основные характеристики
- Количество осей: 6
- Полезная нагрузка: до 20–25 кг
- Радиус действия: до 1800 мм
- Повторяемость: до ±0,03 мм
- Степень защиты запястья: IP67
- Температурный диапазон: 0…+45 °C
Робот рассчитан на непрерывную работу в условиях производственного участка.
Контроллер управления
Контроллер выполняет координацию движений робота и периферийного оборудования.
Функциональные возможности
- управление роботизированными циклами
- взаимодействие с внешними устройствами
- логика последовательных операций
- интеграция с системами безопасности
- диагностика и мониторинг
Программирование осуществляется через обучающий пульт с пошаговым заданием траекторий.
Поворотное или позиционирующее устройство
Для удобства загрузки и выгрузки применяется позиционирующее устройство, обеспечивающее разделение зон оператора и робота.
Назначение
- фиксация детали в заданном положении
- ускорение производственного цикла
- повышение безопасности персонала
Поворот осуществляется только при подтверждении безопасного состояния зоны.
Захватное устройство
Захват предназначен для надежного удержания элементов вентиляционных узлов различной формы.
Особенности
- пневматическое исполнение
- сменные кулачки под геометрию изделия
- устойчивость к загрязнениям
- стабильное удержание при перемещении
Конструкция допускает адаптацию под разные типоразмеры деталей.
Накопитель заготовок
Накопитель используется для размещения заготовок и готовых изделий.
Функции
- хранение деталей в определённом порядке
- подача заготовок роботу
- разделение готовых и необработанных изделий
Конфигурация накопителя формируется под технологию производства.
Описание технологического процесса
Оператор размещает заготовки в накопитель и подтверждает готовность запуска.
Далее система работает автоматически:
- робот забирает деталь из накопителя
- устанавливает её в рабочую зону
- после выполнения операции извлекает изделие
- перемещает готовую деталь в зону выгрузки
- приступает к следующему циклу
Рабочие зоны оператора и робота полностью разделены.
Комплектация
- промышленный робот-манипулятор
- контроллер управления и пульт оператора
- позиционирующее устройство
- пневматический захват
- накопитель заготовок
- система безопасности
- защитные ограждения
- шкафы управления
- интеграция оборудования в единый комплекс
- пусконаладочные работы
- обучение персонала







