Паллетирование
- Главная
/ Паллетирование

26 Марта 2025
Роботизированный комплекс паллетирования с диспенсером паллет
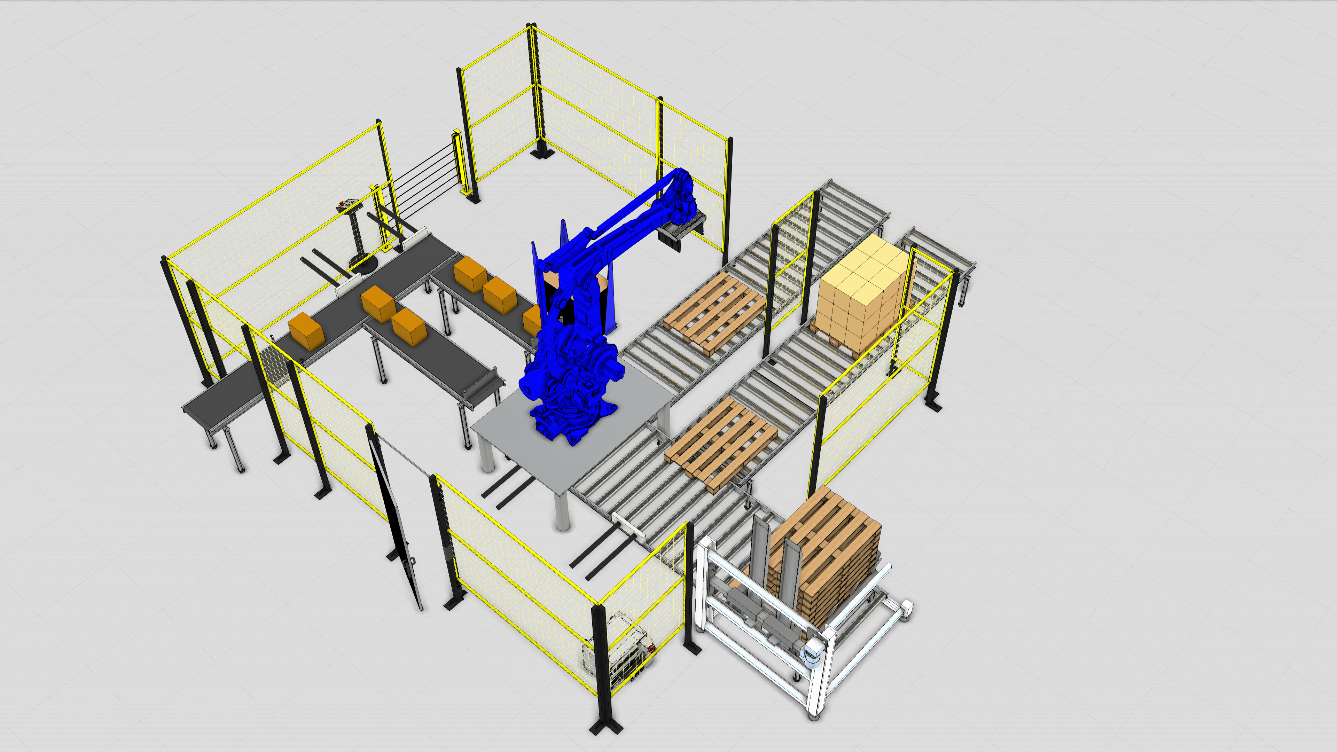
Комплекс для автоматической укладки коробов/пакетов на паллеты с распределением продукции по конвейерам, считыванием кода и автоматической подачей паллет.
Подача паллет → Укладка прокладочного листа → Сканирование короба → Сортировка по конвейерам → Буфер и ориентация → Захват роботом → Паллетирование → Выдача паллеты на разгрузку
Промышленный робот Yaskawa Motoman PL190
Быстрый и мощный 4-осевой робот для паллетирования. Производительность — более 1700 циклов/час. Имеет большой рабочий диапазон: вылет до 3159 мм, высота штабелирования — более 2600 мм.
Конструкция компактная и устойчивая, без необходимости в тяжелом противовесе. Кабели и пневмолинии можно проложить через полое запястье и оси, что упрощает обслуживание.
Технические характеристики
- Количество осей: 4
- Максимальная грузоподъёмность: 190 кг
- Повторяемость: ±0,05 мм
- Максимальная досягаемость: 3159 мм
- Температурный режим: 0…+45 °C
- Допустимая влажность: 20–80%
- Масса: 1680 кг
- Номинальная мощность: 9,5 кВт
Оси и скорости
- Ось S: ±180°, 140°/сек
- Ось L: +90° / -45°, 145°/сек
- Ось U: +15,5° / -120°, 145°/сек
- Ось T: ±360°, 420°/сек
- Допустимый момент инерции (ось T): 90 кг/м²
Контроллер Yaskawa Motoman YRC1000
Компактный контроллер для управления роботом и периферией (позиционеры, линейные оси, порталы). Поддерживает работу до 8 роботов и внешние оси (в сумме до 72).
Пульт с сенсорным экраном и горячими клавишами ускоряет обучение точек и настройку параметров. Программы строятся на понятных строковых командах, а язык Inform III позволяет делать сложную логику управления.
Ключевые возможности
- Время загрузки: менее 40 секунд
- ARM (Advanced Robot Motion): контроль нагрузки и момента, оптимизация ускорений, подавление вибраций, коррекция позиции, обнаружение коллизий
- Встроенный мягкий ПЛК: управление периферией в пределах ячейки
- Связь и интеграция: Ethernet, цифровые I/O, web/FTP мониторинг
- Промышленные протоколы: поддержка шин и сетей (включая OPC/UA и популярные промышленные интерфейсы)
Подходы к программированию
- стандартный сенсорный пульт
- программирование через ПЛК-среды (функциональные блоки)
- программирование с ПК
- offline-моделирование (OLP / Digital Twin)
- мастера и приложения
- CAD/CAM постпроцессоры (G-code)
- ROS и сторонние среды
- SDK/API, зрение 2D/3D, датчики силы/момента, ИИ
Пневмомеханический захват для гофрокоробов
Захват для механического/фрикционного удержания продукта с двух сторон — подходит для случаев, когда верхний захват невозможен.
Подходит для перемещения продукции в коробках, ящиках, пленке, тонкостенной упаковке, а также для укладки прокладочных листов между слоями.
- Одновременное удержание: до 4 коробок
- Максимальный вес одной коробки: до 30 кг
Автоматический диспенсер паллет
Автономное устройство, встраиваемое в конвейерную линию. Загруженная стопка пустых паллет выдается по одной на линию. Может работать и в режиме накопления — собирать пустые паллеты в стопки после растаривания.
Диспенсер повышает производительность, улучшает безопасность, снижает нагрузку на персонал и уменьшает использование складской техники. Также обеспечивает строгую ориентацию паллет на конвейере.
Логика работы
- Загрузка: паллеты подаются по одной или стопкой
- Выдача: устройство опускает стопку и выдает паллеты поштучучно
- Накопление: формирование стопки пустых паллет после разгрузки
Технические характеристики
- Производительность: 150 паллет/час
- Грузоподъемность: 675 кг
- Потребляемая мощность: 0,06 кВт
- Расход воздуха: 10 м³/ч
- Рабочее давление: 6–8 бар
- Макс. количество паллет в пачке: 15 шт.
Промышленный лазерный сканер Datalogic DS2400N
Сканер для считывания кодов на коротких и средних дистанциях. Подходит для складов и производственных линий. Конструкция и ПО позволяют читать поврежденные или плохо напечатанные этикетки.
Технические характеристики
- Дистанция считывания: 70–600 мм
- Максимальное разрешение: до 0,12 мм
- Скорость сканирования: 500–1000 скан/сек
- Тип сканирования: линейный / растровый
- Апертурный угол: 60°
- Мультисчитывание: до 10 этикеток за одну фазу считывания
- Технология восстановления кода: ACR Advanced Code Reconstruction
- Читаемые коды: Code 2/5, Code 39, Code 93, Code 128, EAN/UPC, EAN 128, Codabar, Pharmacode, Plessey, ISBT128
- Материал корпуса: алюминий
- Температура эксплуатации: 0–45 °C
- Питание: 10–30 В DC
- Потребляемая мощность: 4 Вт (средняя)
- Класс защиты: IP65
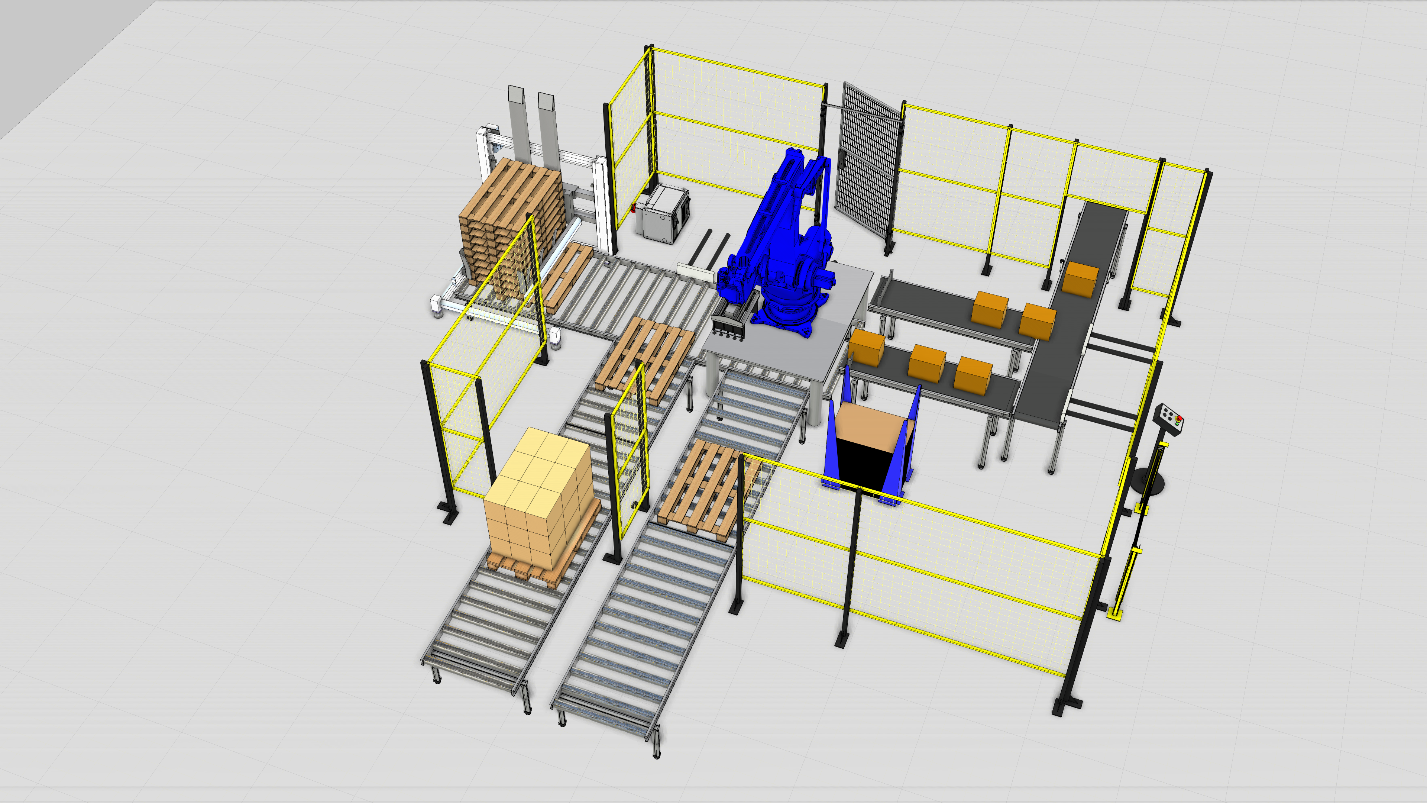
Описание технологического процесса
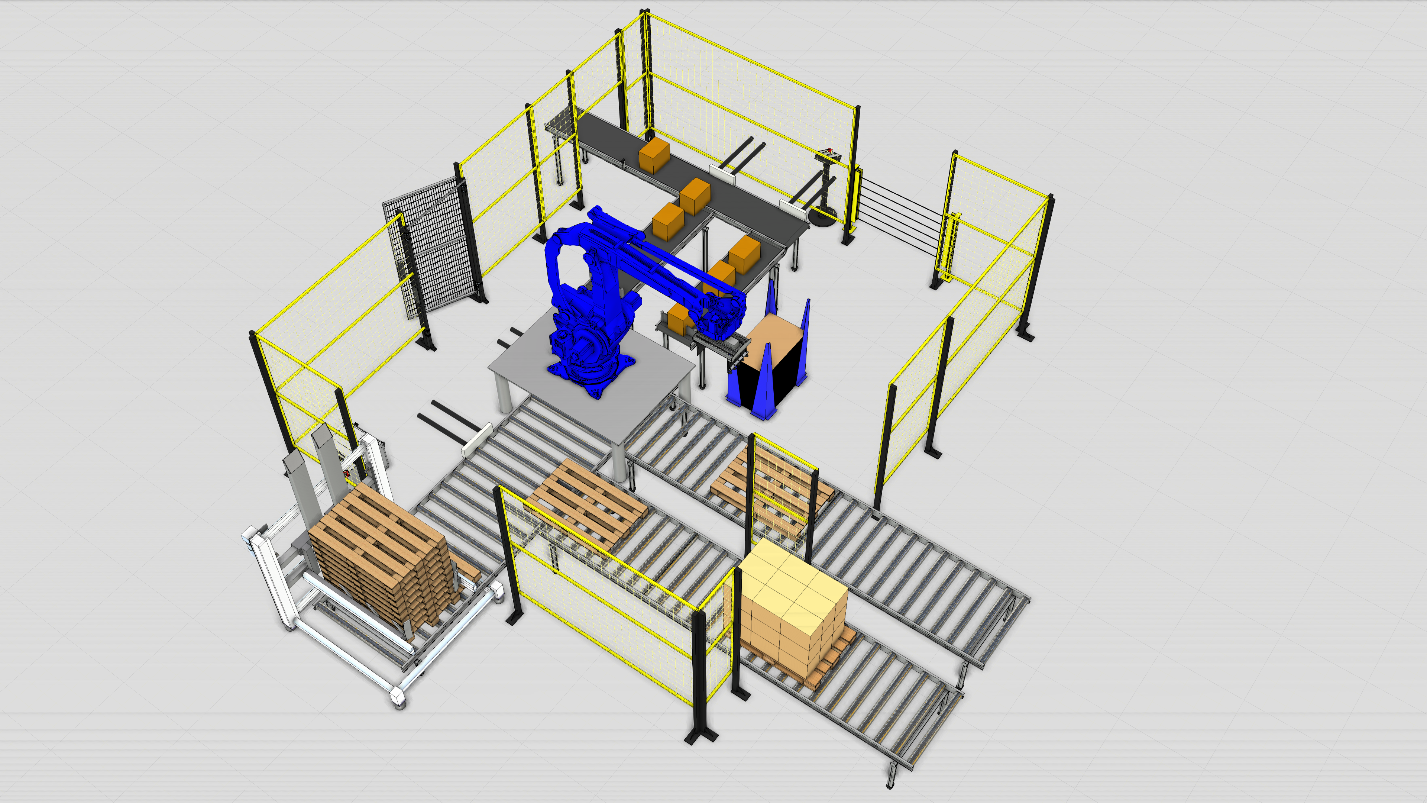
Оператор подвозит стопку паллет и устанавливает в магазин. Далее паллеты выравниваются независимой системой пневмоцилиндров (через каждые две паллеты), чтобы исключить перекосы и смещения нижней паллеты под нагрузкой.
Рядом расположен накопитель картонных прокладочных листов. Робот поднимает лист с помощью выбрасываемых присосок и укладывает на паллету. Затем паллета с листом переносится на транспортер — уже с использованием крючьев для подъема паллеты. На транспортере предусмотрены две независимые позиции установки паллет. Слипание листов исключается за счет вертикальных щеток.
Продукция перемещается по транспортеру и проходит через участок считывания кода с короба. После считывания короб селектором направляется на один из двух транспортеров продукции и движется к буферной зоне.
Буферная зона ориентирует короба для корректного захвата роботом. Для снижения риска заторов применяются шариковые рольганги.
После завершения укладки на паллету робот забирает следующую паллету, а заполненная паллета перемещается к точке разгрузки.
Цены и комплектация
-
Промышленный робот Yaskawa Motoman PL190 + контроллер YRC1000 — 1 комплект
Стоимость: 1 440 062 ¥ (включая НДС 20%) -
Автоматический диспенсер паллет
-
Пневмомеханический захват для коробов и прокладочных листов
-
Транспортеры для выдачи паллет с продукцией
-
Транспортеры для выдачи продукции
-
Блок управления пневматикой
-
Промышленный сканер кодов Datalogic
-
Бункер для прокладочных листов
-
Система безопасности
-
Тумба для робота
-
Защитные ограждения
-
Интеграция оборудования в единый комплекс (кабели, шланги, разъемы, кронштейны)
- пусконаладочные работы на территории заказчика
- обучение персонала
Комплектов: 2 шт.
Общая стоимость: 2 880 124 ¥ (включая НДС 20%)







