Паллетирование
- Главная
/ Паллетирование

18 Апреля 2025
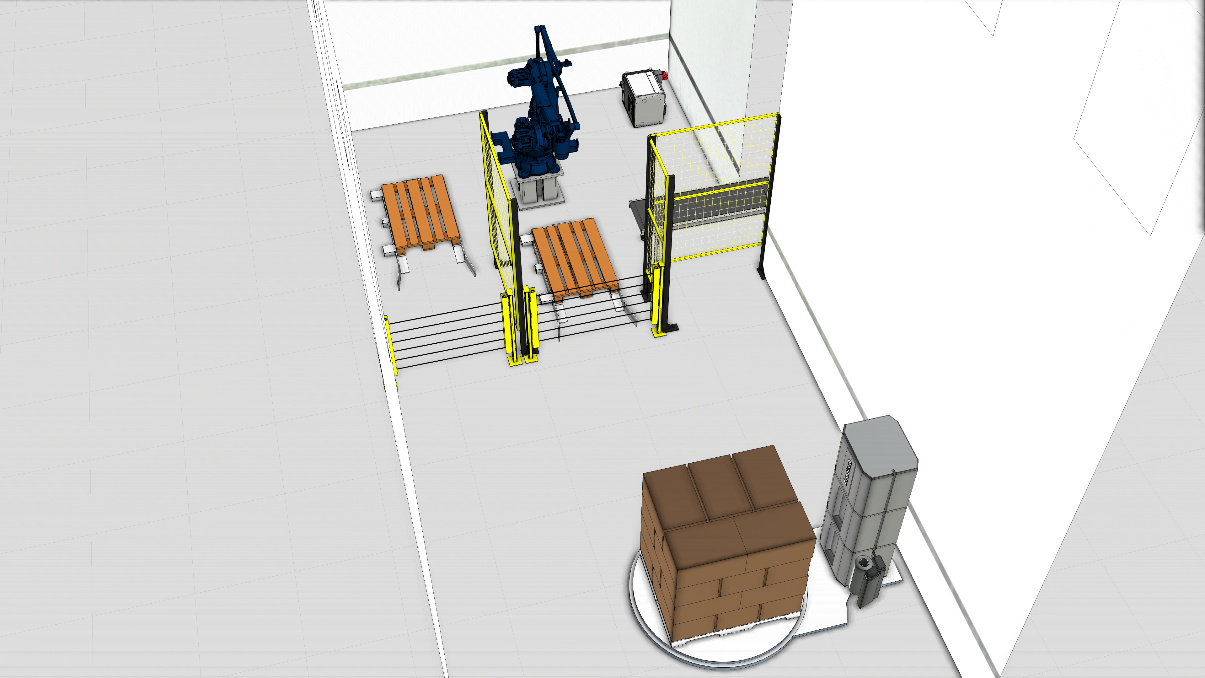
Роботизированный комплекс паллетирования блоков «Солома»
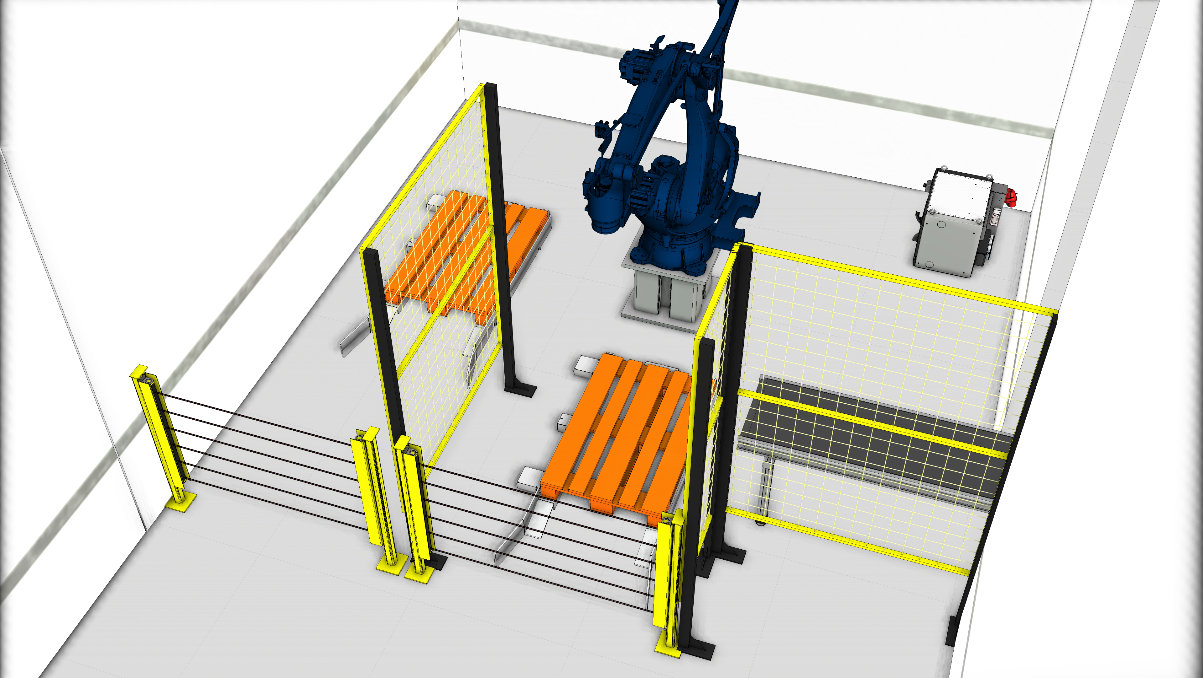
Комплекс для автоматической укладки блоков на паллеты с применением промышленного робота, пневмомеханического вилочного захвата и двух парковок для паллет.
Подача блоков по гравитационному транспортеру → Буферная зона → Захват блока вилочным захватом → Укладка на паллету → Сигнал заполнения → Переключение на 2-ю паллету
Промышленный робот-манипулятор CRP RP24-130
CRP RP24-130 — быстрый 4-осевой робот для паллетирования и перекладки продукции. Длина руки 2485 мм и грузоподъёмность 130 кг позволяют работать с крупными и тяжёлыми изделиями.
Технические характеристики
- Количество осей: 4
- Полезная нагрузка: 130 кг
- Повторяемость: ±0,2 мм
- Максимальный радиус действия: 2485 мм
- Масса робота: 820 кг
- Уровень шума: менее 80 дБ
- Способ крепления: к поверхности пола
- Температура эксплуатации: 0…45 °C
- Относительная влажность: 20…80%
- Вибрации: < 0,5 G
- Класс защиты: IP54
- Среднее потребление мощности: 5 кВт
Диапазоны движения по осям
- Ось J1: -175…+175°
- Ось J2: +3…129°
- Ось J3: +85…+210°
- Ось J4: -360…+360°
Скорости по осям
- Ось J1: 154 °/сек
- Ось J2: 166 °/сек
- Ось J3: 104 °/сек
- Ось J4: 271 °/сек
Допустимые нагрузки на ось 4
- Допустимый крутящий момент: 125 Н·м
- Допустимый инерционный момент: 13 кг/м²
Шкаф электроавтоматики G4 и пульт обучения
Система управления оптимизирует траекторию движения, ускорения и замедления робота, корректно распределяя нагрузки по осям для стабильной работы в цикле.
Контроллер построен на архитектуре ARM + DSP + FPGA, управляет до 10 осей и обрабатывает до 500 млн операций/сек, что позволяет одновременно вести движение робота и управлять периферийными устройствами.
Поддерживаются интерфейсы связи: Ethernet, RS232, RS485, CAN, DeviceNet.
Пневмомеханический вилочный захват для блоков
Вилочный захват предназначен для механического/фрикционного удержания блока с двух сторон — оптимально для изделий, где захват сверху невозможен.
Для работы требуется пневмолиния 6 бар.
Парковки для паллет
Комплекс предусматривает 2 парковки паллет, что снижает простои при замене заполненной паллеты на пустую и обеспечивает непрерывный цикл работы.
Система безопасности
Оба входа к зонам загрузки паллет оборудованы световыми барьерами, которые мгновенно останавливают оборудование при пересечении.
При аварийной остановке робота формируется сигнал аварийного состояния на клеммные колодки панели управления машины, формирующей блоки.
Система мониторинга «Цифровой двойник DSL»
Комплекс комплектуется системой мониторинга для контроля состояния оборудования и параметров работы участка.
Описание технологического процесса
Продукция поступает по существующему (модернизированному) гравитационному транспортеру в буферную зону. После подтверждения наличия блока робот получает сигнал, захватывает изделие вилочным захватом и укладывает на паллету.
После завершения сборки паллеты включается соответствующая индикация на световой стойке, а робот автоматически переходит к сборке следующей паллеты (если она установлена во второй парковке). В это время оператор забирает заполненную паллету и устанавливает пустую.
Цены и комплектация
- Промышленный робот-манипулятор CRP RP24-130 + контроллер G4 — 6 020 597 руб. (включая НДС 22%)
- Пневмомеханический вилочный захват
- Блок управления пневматикой
- Парковки для паллет — 2 шт.
- Тумба для робота с защищённым фланцем (нерж. сталь)
- Система мониторинга «Цифровой двойник DSL»
- Комплект ограждений и система безопасности (датчики, световые индикаторы и т.д.)
- Интеграция оборудования в единый комплекс (кабели, шланги, разъёмы, кронштейны) + ПНР + обучение — 600 000 руб. (включая НДС 22%)
Общая стоимость комплекса: 6 620 597 руб. (включая НДС 22%)







