Паллетирование
- Главная
/ Паллетирование

22 Января 2025
Роботизированный комплекс паллетирования гофрокоробов
Комплекс для автоматической укладки гофрокоробов на паллеты с боковым захватом и подачей прокладочных листов из бункера.
Подача коробов по транспортеру → Буферная зона → Захват коробов сбоку → Укладка на паллету → Сигнал заполнения паллеты → Переключение на вторую паллету
Промышленный робот-манипулятор Yaskawa GP35L
Yaskawa GP35L — универсальный шестиосевой промышленный робот с полезной нагрузкой 35 кг, радиусом действия 2 538 мм и высокой повторяемостью ±0,07 мм.
Робот сочетает полезную нагрузку, скорость и допустимый момент на осях, что дает высокую динамику и короткий цикл. Компактная конструкция снижает требования к месту установки и упрощает интеграцию.
Доступна версия со степенью защиты IP65/67 для работы в неблагоприятных условиях.
Технические характеристики
- Количество осей: 6
- Максимальная грузоподъемность: 35 кг
- Повторяемость: 0,07 мм
- Досягаемость: 2 538 мм
- Рабочий температурный режим: 0º…+45ºС
- Масса: 600 кг
- Номинальная мощность: 4 кВт
Оси и скорости
- Ось S: диапазон ±180º, скорость 180º/сек
- Ось L: диапазон +135º/-90º, скорость 140º/сек
- Ось U: диапазон +206º/-80º, скорость 178º/сек
- Ось R: диапазон ±360º, скорость 250º/сек, момент 147 Н·м, инерция 10 кг/м²
- Ось B: диапазон ±125º, скорость 250º/сек, момент 147 Н·м, инерция 10 кг/м²
- Ось T: диапазон ±360º, скорость 360º/сек, момент 78 Н·м, инерция 4 кг/м²
Контроллер Yaskawa Motoman YRC 1000
YRC 1000 — компактная многозадачная платформа контроллера для роботов и периферии (позиционеры, линейные оси, порталы). Координирует движение до 8 роботов и дополнительных внешних осей (в сумме до 72).
Контроллер оснащен стандартными интерфейсами (Ethernet, цифровые входы/выходы) и поддерживает удаленный мониторинг/обслуживание через Web/FTP.
Функция ARM (Advanced Robot Motion) улучшает траекторию движения, снижает вибрации и повышает чувствительность к коллизиям.
Также доступна интеграция в промышленные сети и современные протоколы цифрового производства (включая OPC/UA).
Пневмомеханический боковой захват для гофрокоробов
Захват предназначен для механического/фрикционного удержания коробов с двух сторон — это удобно, когда захват сверху невозможен.
Подходит для перемещения продукции в коробах/ящиках, а также для тонкостенной упаковки разных форм.
Бункер прокладочных листов
Бункер хранит картонные прокладочные листы и обеспечивает удобную подачу листов в зону обслуживания робота для укладки между слоями.
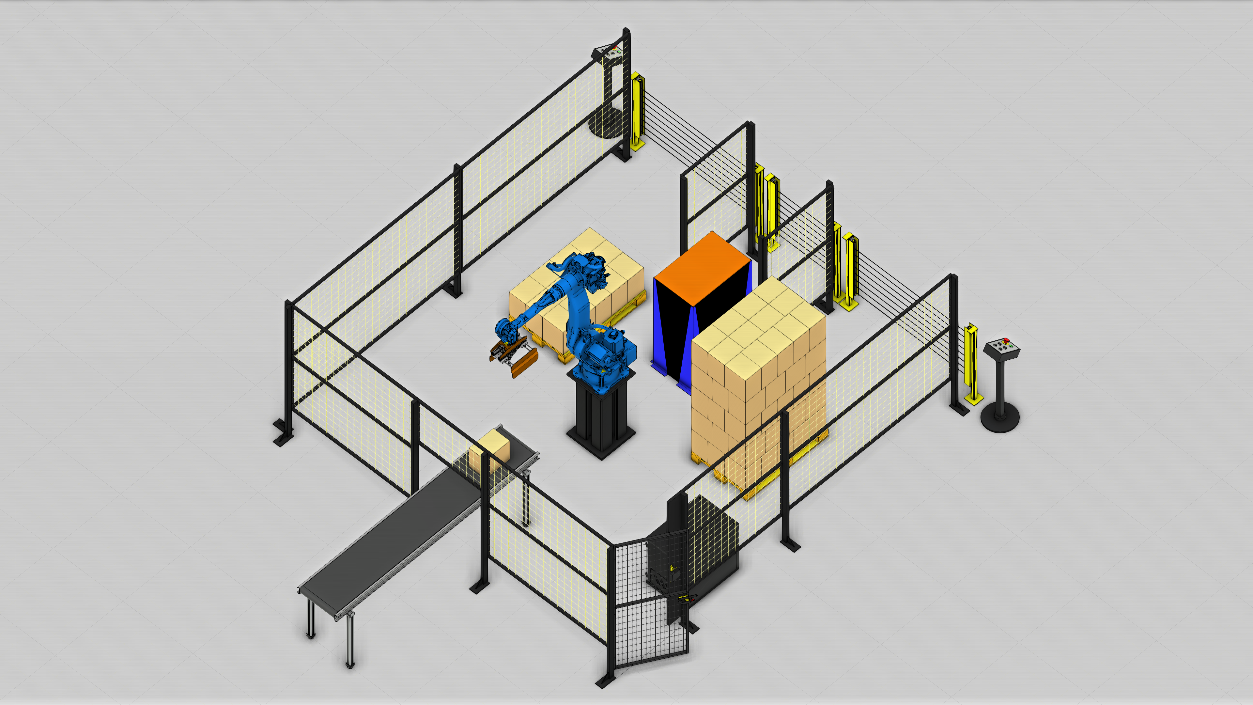
Описание технического процесса
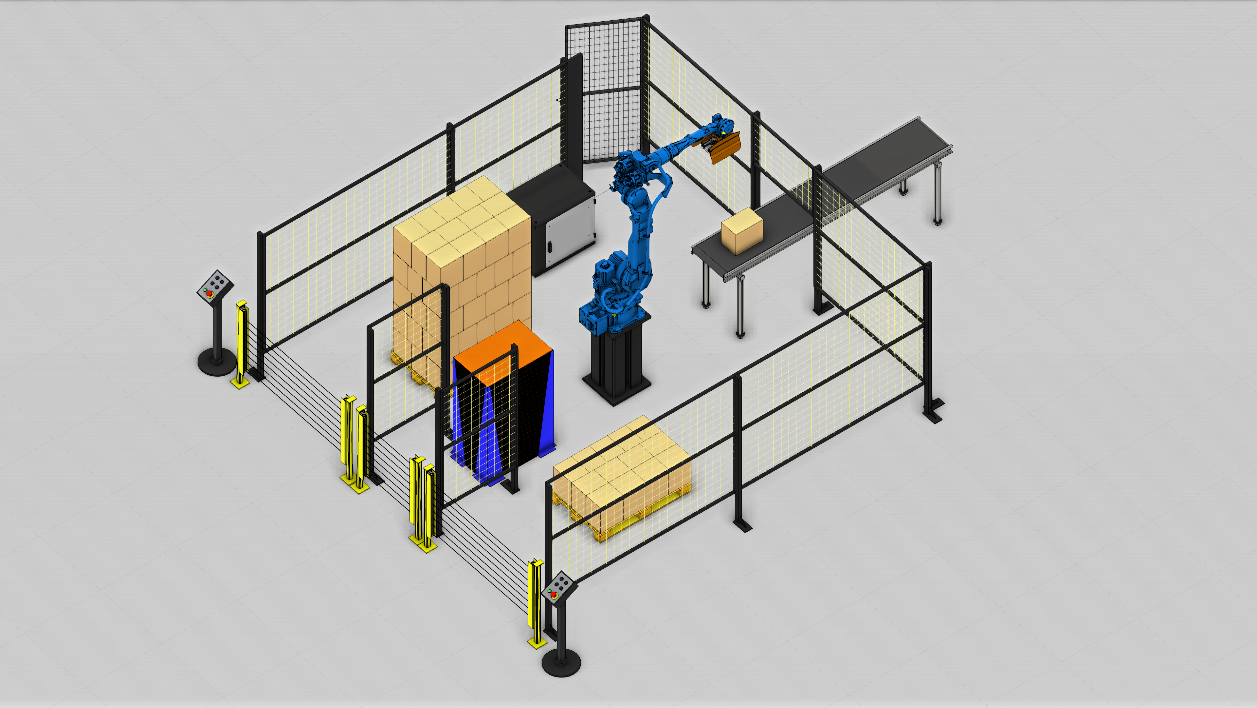
РТК представляет собой закрытый участок с промышленным роботом, обслуживающим транспортер, бункер с прокладочными листами и два паллетоприемника.
Коробки с продукцией перемещаются по транспортеру в буферную зону, после чего роботу передается сигнал, и он перемещает коробку на паллету.
По завершении сборки одной паллеты загорается сигнал на световой стойке, и робот автоматически переходит к сборке следующей паллеты (если она находится в паллетоприемнике). В это время оператор может увезти заполненную паллету и заменить ее на пустую.
Цены и комплектация
-
Промышленный робот-манипулятор Yaskawa Motoman GP35L
Контроллер Yaskawa Motoman YRC 1000
Стоимость: 129 873 USD (включая НДС 20%) -
Пневмомеханический захват
-
Блок управления пневматикой
-
Доработка транспортера
-
Бункер для картонных листов
-
Рамки для установки паллет — 2 шт.
-
Система безопасности
-
Комплект ограждений высотой 2 метра (датчики безопасности, световые индикаторы и т.д.)
-
Интеграция оборудования в единый комплекс (кабели, шланги, разъемы, кронштейны)
- пусконаладочные работы на территории заказчика
- обучение персонала
Общая стоимость: 129 873 USD (включая НДС 20%) *







