Паллетирование
- Главная
/ Паллетирование

11 Июля 2024
Роботизированный комплекс паллетирования канистр
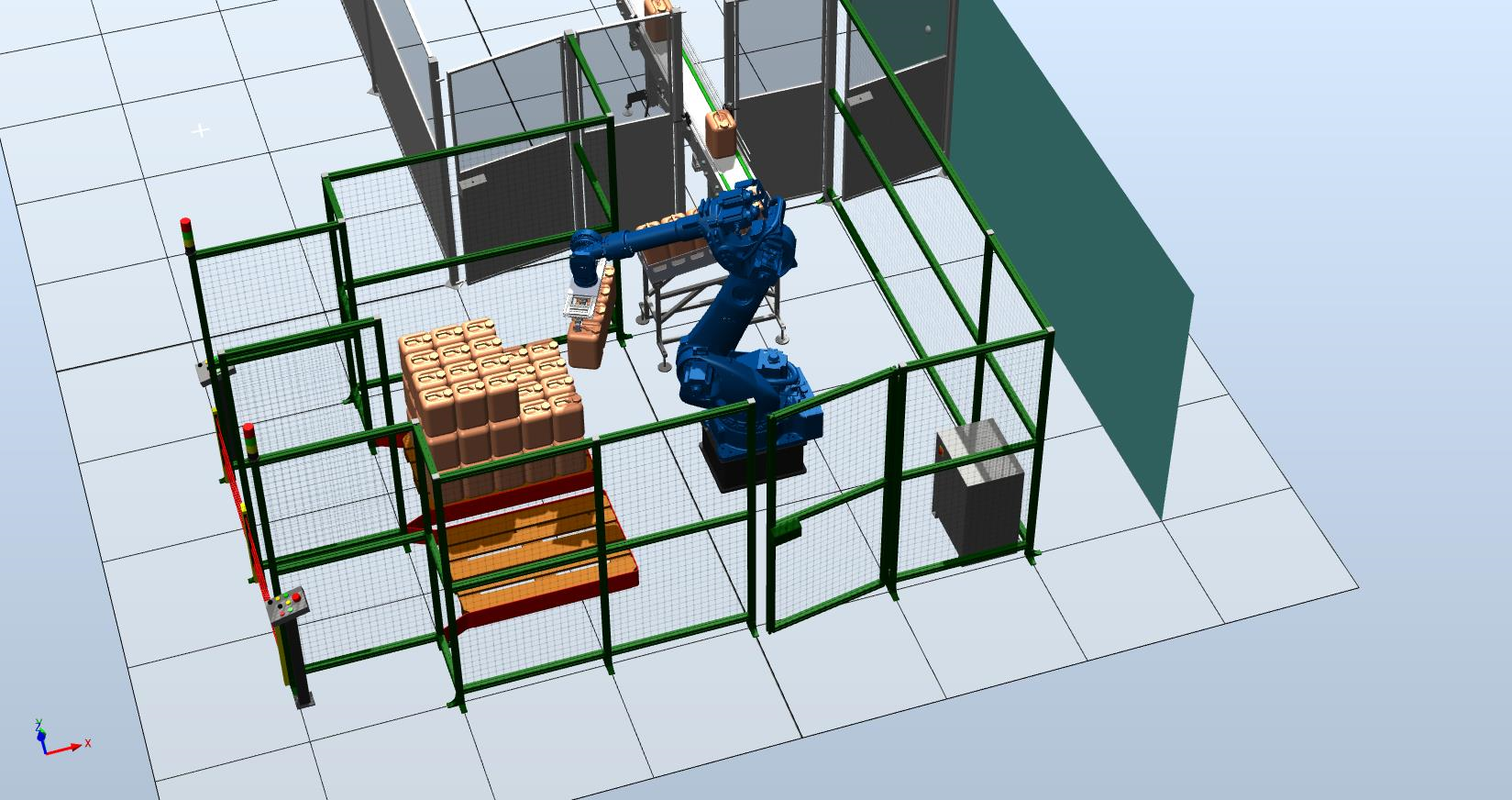
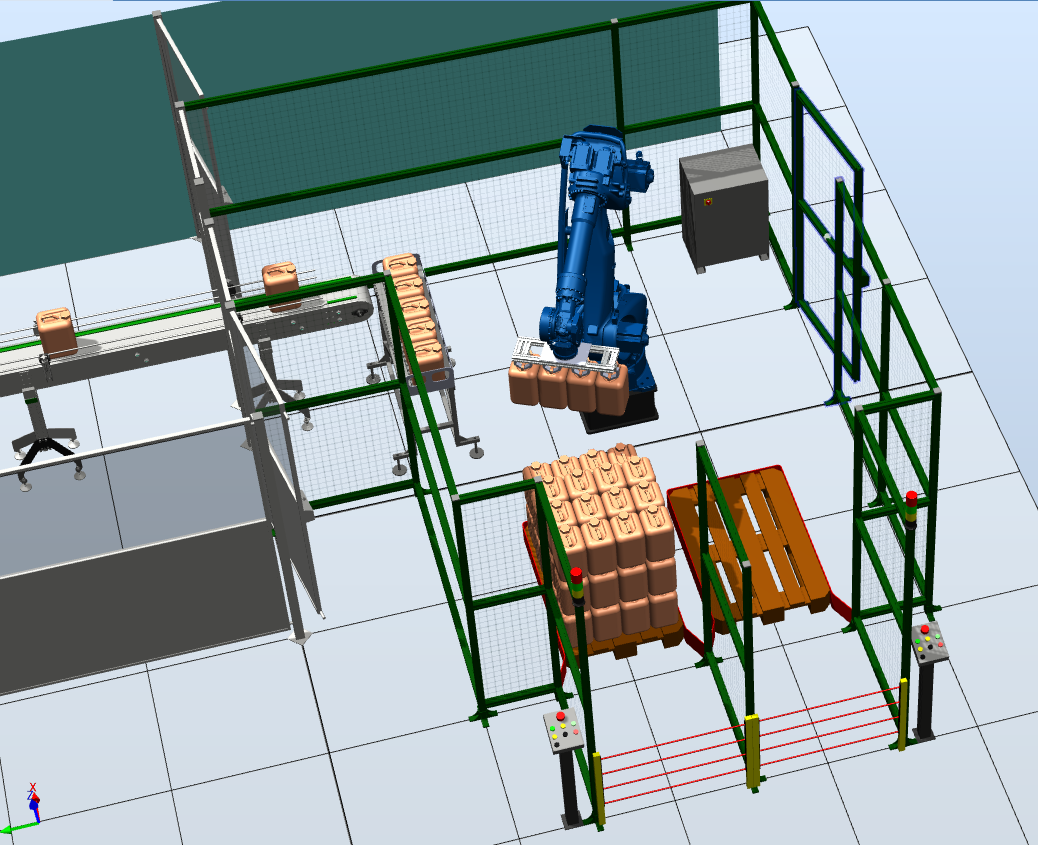
Комплекс для автоматического паллетирования канистр с подачей по транспортеру, накоплением на гравитационном накопителе и работой на две паллеты.
Транспортер → Сдвиг канистр в накопитель → Накопление 4 шт. → Робот переносит сразу 4 канистры → Укладка на паллету → Переключение на вторую паллету
Промышленный шестиосевой робот Yaskawa Motoman GP 180-120
Yaskawa Motoman GP 180-120 — мощный и быстрый 6-осевой робот-манипулятор, который сокращает время рабочего цикла и уверенно работает с тяжелыми грузами.
Высокая грузоподъемность, увеличенные значения момента и инерции позволяют роботу работать с большими деталями. Верхняя часть манипулятора выполнена с тонким профилем запястья — это уменьшает ширину робота и облегчает работу в ограниченном пространстве.
Кабели и воздушные линии проложены через основание робота к верхнему запястью — это увеличивает срок службы коммуникаций и повышает безопасность. Также предусмотрен канал в основании для удобной прокладки кабелей и шлангов к инструменту на фланце.
Запястье имеет степень защиты IP67, корпус — IP54.
Технические характеристики
- Количество осей: 6
- Максимальная грузоподъемность: 120 кг
- Повторяемость: 0,05 мм
- Максимальная досягаемость: 3058 мм
- Температурный режим: 0º…+45ºC
- Допустимая влажность окружающей среды: 20–80%
- Масса: 1090 кг
- Номинальная мощность: 5 кВт
Оси и скорости
- Ось S: диапазон ±180º, скорость 125º/сек
- Ось L: диапазон +76º / -60º, скорость 115º/сек
- Ось U: диапазон +90º / -86º, скорость 125º/сек
- Ось R: диапазон ±360º, скорость 182º/сек, момент 883 Н·м, инерция 79 кг/м²
- Ось B: диапазон ±130º, скорость 175º/сек, момент 883 Н·м, инерция 79 кг/м²
- Ось T: диапазон ±360º, скорость 265º/сек, момент 520 Н·м, инерция 40 кг/м²
Контроллер и пульт Yaskawa Motoman YRC 1000
YRC 1000 — компактная и мощная многозадачная платформа контроллера для роботов и периферийных устройств (позиционеры, линейные оси, порталы). Может координировать движение до 8 роботов и дополнительных внешних осей (в сумме до 72).
Контроллер обычно комплектуется стандартным пультом программирования с сенсорным дисплеем и горячими клавишами — это ускоряет обучение позиций и настройку параметров. Программы строятся на понятных строковых операторах. Для сложной логики применяется язык высокого уровня Inform III. Права пользователей управляются через USB-носитель.
Быстрый процессор, современная ОС и высокоскоростные сервоприводы обеспечивают высокие ускорения и точную траекторию. Функция ARM (Advanced Robot Motion) контролирует момент и нагрузку на осях, оптимизирует динамику, устраняет вибрации, быстро корректирует цель и помогает обнаруживать коллизии.
Контроллер легко встраивается в существующие сети: стандартные интерфейсы (в т.ч. Ethernet, цифровые I/O), web-сервер TCP/IP с поддержкой FTP для удаленного мониторинга и обслуживания. Поддерживаются протоколы цифрового производства, включая OPC/UA (в т.ч. спецификация VDMA Robotics Companion Specification).
Также доступны промышленные шины и протоколы (Profinet, DeviceNet, Profibus, Ethernet/IP, ModbusTCP, CCLink, EtherCAT, включая варианты safety) и интеграция с периферией: захваты, 2D/3D-зрение, датчики силы/момента, HMI и т.д.
Описание технологического процесса
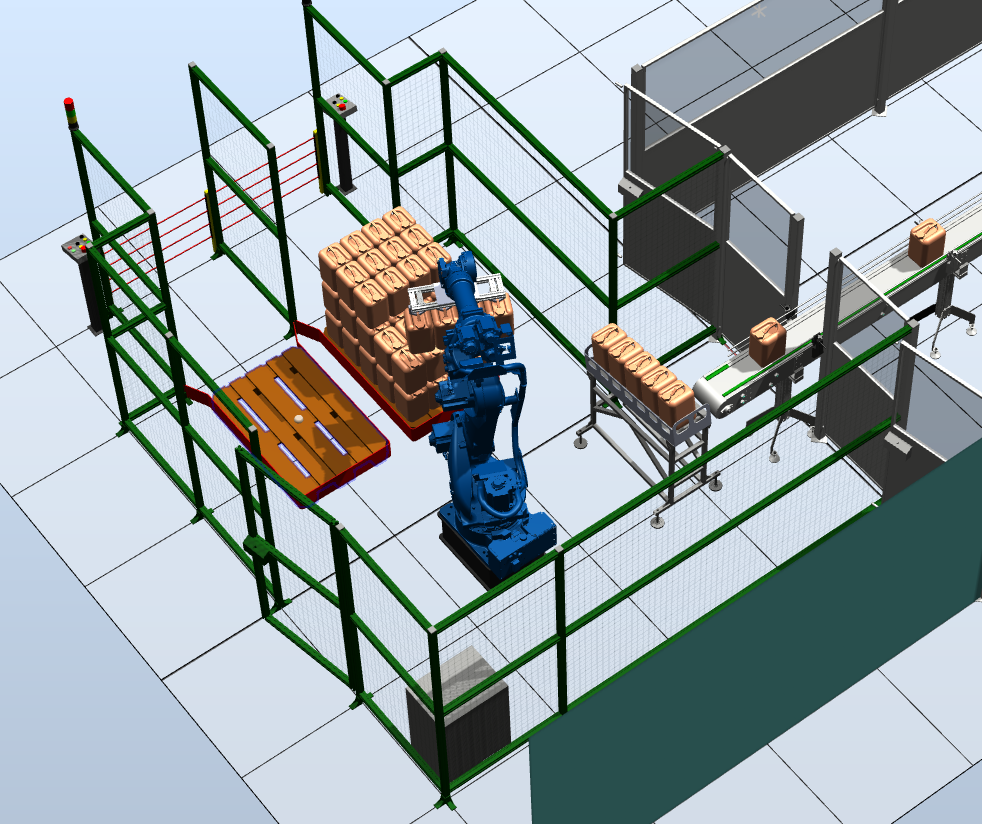
Участок состоит из промышленного робота с пневмомеханическим захватом на фланце, гравитационного накопителя в конце транспортера и двух приемников паллет.
Ближе к концу транспортера установлен оптический датчик, который взаимодействует с пневмоцилиндром — он выталкивает канистры на гравитационный накопитель. Когда канистры накапливаются в количестве 4 штук, робот получает сигнал и запускает программу переноса сразу четырех канистр на паллету.
Индикация заполнения паллеты:
- 70% заполнения — загорается желтый сигнал
- 100% заполнения — загорается зеленый сигнал (можно забирать паллету)
После заполнения первой паллеты робот автоматически переходит на соседнюю паллету. Оператор в это время меняет заполненную паллету на пустую.
Безопасность и логика барьеров
Барьеры безопасности останавливают робота в зависимости от того, какой коридор загрузки был пересечен:
- если робот выгружает канистры на паллету №1 и пересечен коридор №1 — робот остановится до выхода оператора и подтверждения на пульте
- в этот момент барьеры коридора №2 неактивны, и оператор может заменить паллету №2 без остановки комплекса
Цены и комплектация
-
Робот-манипулятор Yaskawa Motoman GP 180-120
Контроллер Yaskawa Motoman YRC 1000
Пульт управления роботом
Стоимость: 7 977 642 руб. (включая НДС 20%) -
Пневмомеханический захват
-
Блок управления пневматикой
-
Гравитационный накопитель
-
Система безопасности
-
Приемники для паллет — 2 шт.
-
Тумба для робота
-
Ограждения
-
Интеграция оборудования в единый комплекс (ПО, блоки управления, кабели, шланги, разъемы, кронштейны)
- пусконаладочные работы на территории заказчика
- обучение персонала
Общая стоимость: 7 977 642 руб. (включая НДС 20%) *







