Паллетирование
- Главная
/ Паллетирование

30 Сентября 2024
Роботизированный комплекс паллетирования продукции
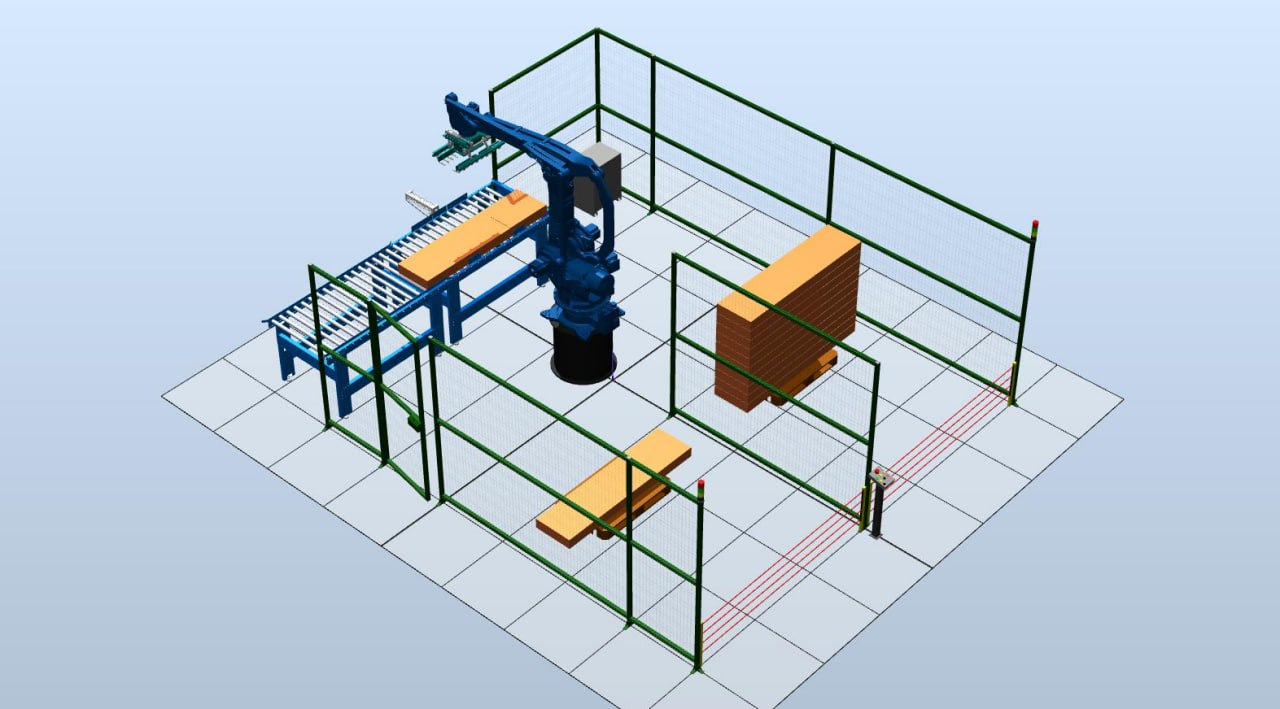
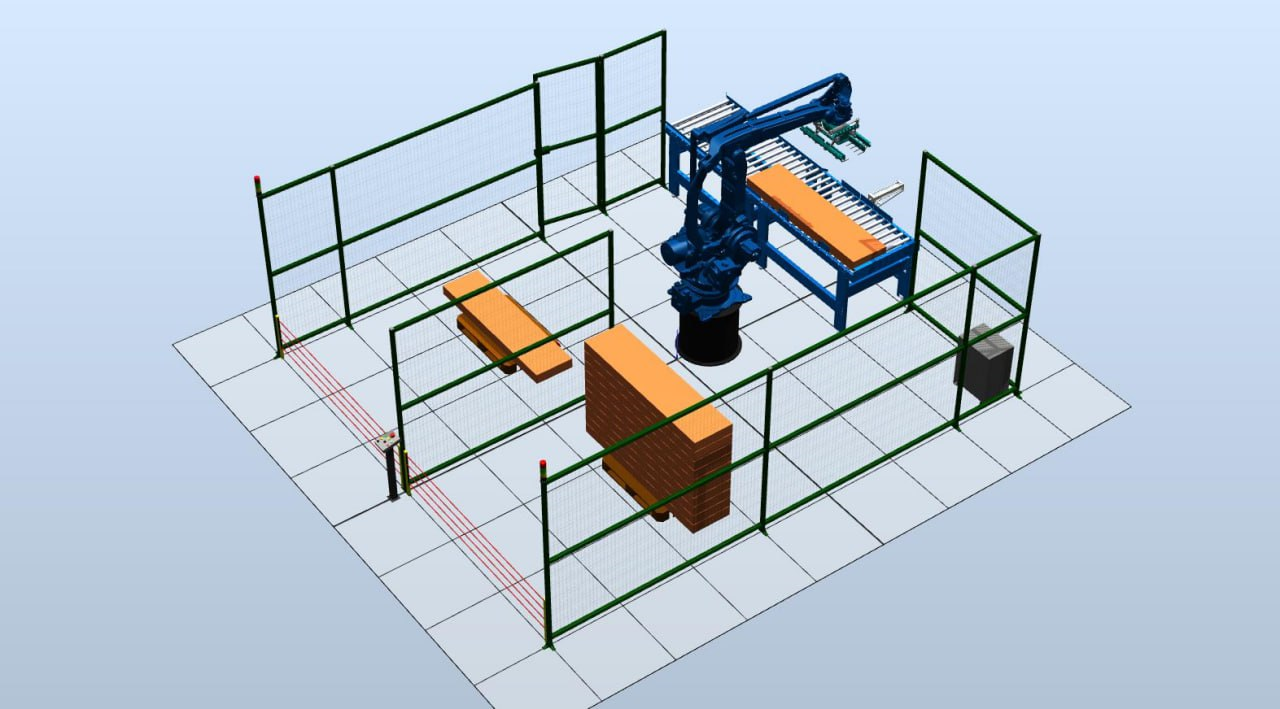
Комплекс для автоматической перекладки коробов с продукцией на паллеты. Подача идёт по модернизированному транспортеру, далее робот забирает короб и укладывает на паллету. Работа ведётся по очереди на две паллеты.
Подача по транспортеру → Позиционирование короба → Захват роботом → Укладка на паллету → Переключение на 2-ю паллету → Замена паллет оператором
Промышленный робот Yaskawa Motoman PL 190
Yaskawa PL 190 — универсальный четырёхосевой промышленный робот с полезной нагрузкой 190 кг, увеличенным радиусом действия 3 159 мм и высокой повторяемостью ±0,05 мм.
Робот даёт хорошую комбинацию грузоподъёмности, скорости и допустимого момента на осях, поэтому обеспечивает высокую скорость и ускорение. Компактная конструкция требует минимум места и снижает помехи для периферии.
Доступна версия со степенью защиты IP65/67 для работы в неблагоприятных условиях.
Технические характеристики
- Количество осей: 4
- Максимальная грузоподъёмность: 190 кг
- Повторяемость: 0,05 мм
- Досягаемость: 3 159 мм
- Рабочий температурный режим: 0º…+45ºС
- Масса: 1 680 кг
- Номинальная мощность: 9,5 кВт
Оси и скорости
- Ось S: диапазон ±180º, скорость 140º/сек
- Ось L: диапазон +90º/-45º, скорость 145º/сек
- Ось U: диапазон +15,5º/-120º, скорость 145º/сек
- Ось T: диапазон ±360º, скорость 420º/сек
- Допустимый момент инерции (ось T): 90 кг/м²
Контроллер Yaskawa Motoman YRC 1000
YRC 1000 — компактная и мощная платформа контроллера для роботов и периферии (позиционеры, линейные оси, порталы). Координирует движение до 8 роботов и дополнительных внешних осей (в сумме до 72).
Контроллер обычно комплектуется стандартным пультом программирования: сенсорный дисплей, горячие клавиши, быстрые настройки позиций и параметров. Программы строятся на строковых командах, а язык Inform III позволяет делать расширенную логику. Права пользователей управляются через USB-носитель.
Быстрый многозадачный процессор, современная ОС и сервоприводы обеспечивают высокие ускорения и точную траекторию. Время загрузки — меньше 40 секунд. Функция ARM (Advanced Robot Motion) контролирует момент и нагрузку на осях, оптимизирует ускорения, снижает вибрации, корректирует целевую координату и помогает обнаруживать коллизии. Встроенный мягкий ПЛК может управлять периферией в пределах ячейки.
Также поддерживается интеграция в сети: Ethernet, цифровые I/O, удалённый мониторинг через Web/FTP, OPC/UA и распространённые промышленные протоколы.
Описание технического процесса
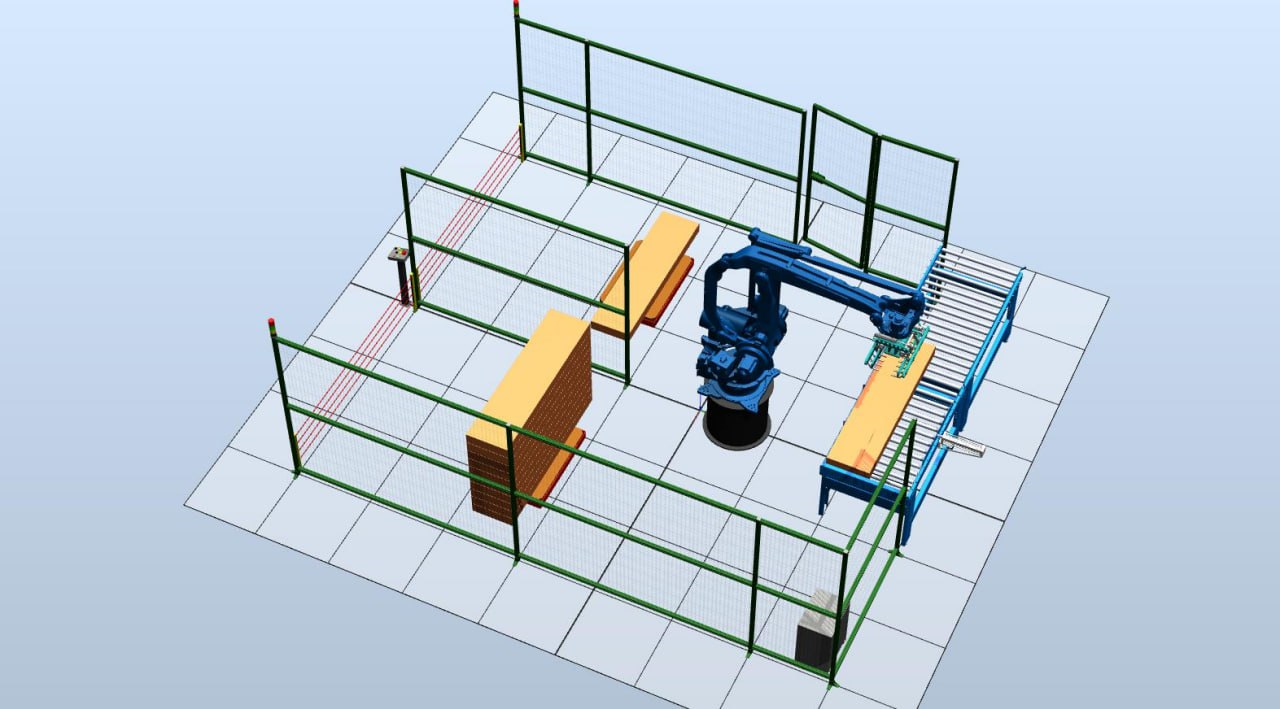
Робот устанавливается рядом с модернизированным транспортером, где поступающая продукция фиксируется оснасткой.
Далее робот:
- забирает короб с продукцией пневмозахватом
- переносит и укладывает на паллету
- после заполнения одной паллеты загорается сигнал на световой стойке
- робот переключается на вторую паллету и продолжает работу
В это время оператор может вывезти заполненную паллету и установить пустую. Цикл повторяется.
Цены и комплектация
- Робот-манипулятор Yaskawa PL 190 — 631 136,88 ¥ (включая НДС 20%)
- Пневмомеханический захват
- Блок управления пневматикой
- Тумба для робота
- Доработка транспортера
- Защитные ограждения
- Интеграция оборудования в единый комплекс, включая кабели, шланги, разъёмы и кронштейны
- пусконаладочные работы на территории заказчика







