Паллетирование
- Главная
/ Паллетирование

15 Ноября 2024
Роботизированный комплекс паллетирования коробов
Комплекс для автоматической укладки коробов на паллеты с подачей по транспортеру, буферизацией в зоне накопления и работой на две паллеты.
Транспортер → Буферная зона (4 короба) → Захват ряда роботом → Укладка на паллету → Переключение на 2-ю паллету → Замена паллет оператором
Промышленный робот Yaskawa Motoman GP35L
Yaskawa Motoman GP35L — универсальный шестиосевой промышленный робот с полезной нагрузкой до 35 кг и радиусом действия 2538 мм. Модель обеспечивает короткое время цикла и высокую повторяемость.
Компактный дизайн удобен для задач типа загрузка/разгрузка и перемещение продукции. Запястье с защитой IP67 подходит для работы в условиях производства.
Технические характеристики
- Количество осей: 6
- Максимальная грузоподъемность: 35 кг
- Повторяемость: ±0,07 мм
- Максимальная досягаемость: 2538 мм
- Температурный режим: 0º…+45ºC
- Допустимая влажность: 20–80%
- Масса: 600 кг
- Номинальная мощность: 4 кВт
Оси и скорости
- Ось S: ±180º, 180º/сек
- Ось L: +135º/-90º, 140º/сек
- Ось U: +206º/-80º, 178º/сек
- Ось R: ±360º, 250º/сек, момент 147 Н·м, инерция 10 кг/м²
- Ось B: ±125º, 250º/сек, момент 147 Н·м, инерция 10 кг/м²
- Ось T: ±360º, 360º/сек, момент 78 Н·м, инерция 4 кг/м²
Контроллер Yaskawa Motoman YRC 1000
YRC 1000 — компактная многозадачная платформа контроллера для роботов и периферии (позиционеры, линейные оси, порталы), координирующая движение до 8 роботов и дополнительных внешних осей (в сумме до 72).
Контроллер обычно комплектуется пультом с сенсорным экраном и горячими клавишами — это ускоряет обучение точек и настройку параметров. Встроенная функция ARM (Advanced Robot Motion) улучшает траекторию, снижает вибрации и повышает чувствительность обнаружения столкновений.
Поддерживается интеграция в сети и промышленные протоколы (включая OPC/UA), а также подключение периферии через стандартные интерфейсы (Ethernet, цифровые входы/выходы).
Пневмомеханический захват для гофрокоробов
Захват разработан для механического/фрикционного удержания продукта с двух сторон. Это удобно, когда захват сверху невозможен.
Подходит для перемещения продукции в коробах/ящиках, упаковки в пленке, а также для тонкостенной тары разных форм.
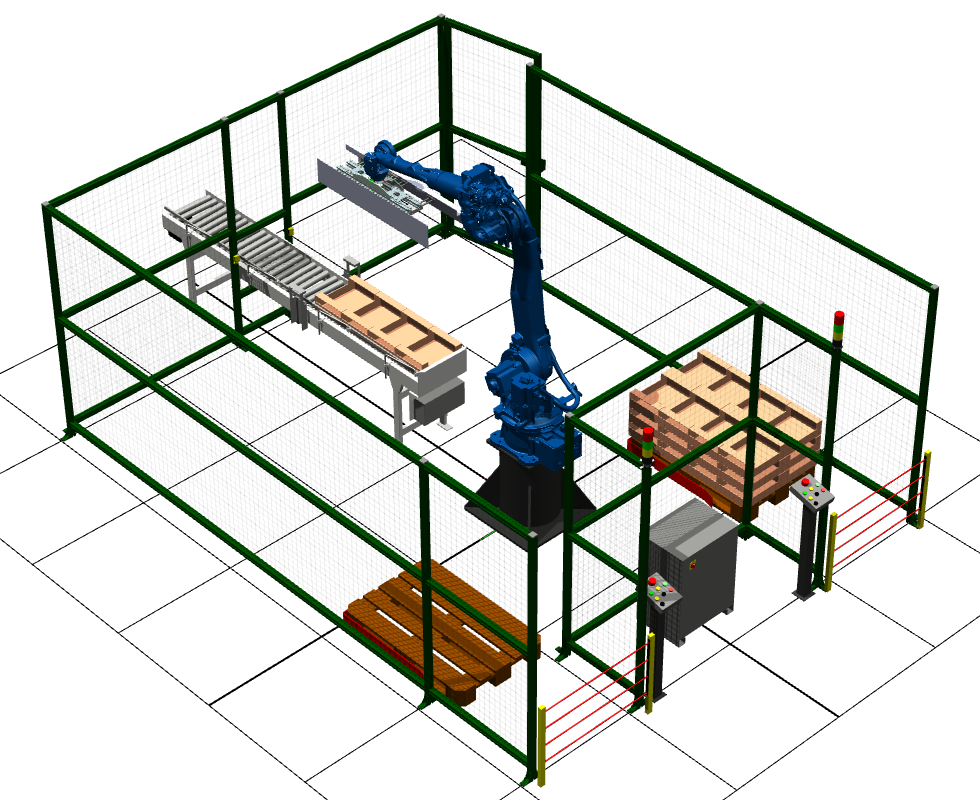
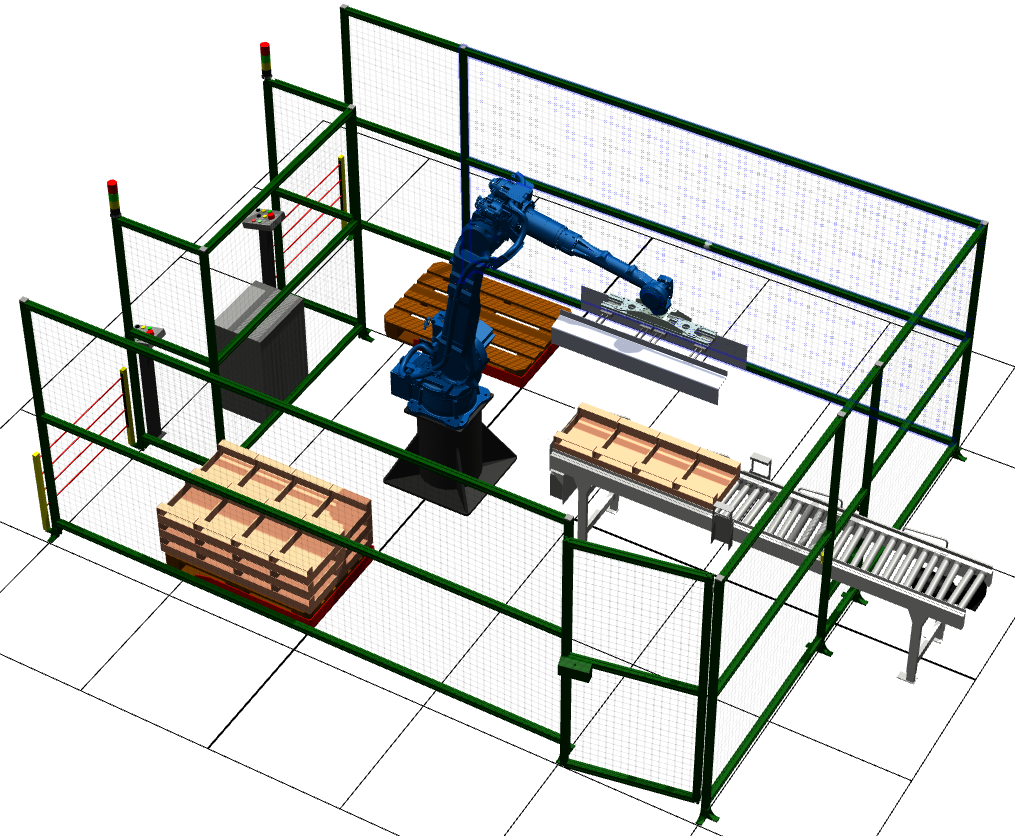
Описание технологического процесса
Комплекс представляет собой закрытый участок с промышленным роботом, обслуживающим транспортер и два паллетоприемника.
- Коробки с продукцией движутся по транспортеру в буферную зону
- В буфере накапливается 4 короба, позиционирование выполняется пневмоподжимами
- После накопления роботу передается сигнал, и он забирает сразу весь ряд
- Робот переносит ряд и укладывает на паллету
- По завершении сборки паллеты загорается сигнал на световой стойке
- Робот автоматически переходит к сборке следующей паллеты, если она установлена в паллетоприемнике
- В это время оператор может вывезти заполненную паллету и заменить её на пустую
Параметры участка
- Максимальная высота собранной паллеты: 2115 мм
- Вместимость буферной зоны: 4 короба
- Время переноса и укладки ряда из 4 коробов: ~5 секунд
Цены и комплектация
- Промышленный робот Yaskawa Motoman GP35L + контроллер YRC 1000 — 365 816 ¥ (включая НДС 20%)
- Пневмомеханический захват — 88 080 ¥ (включая НДС 20%)
- Блок управления пневматикой — 38 724 ¥ (включая НДС 20%)
- Транспортеры для паллет — 107 871 ¥ (включая НДС 20%)
- Накопитель для продукции — 117 734 ¥ (включая НДС 20%)
- ПЛК — 38 670 ¥ (включая НДС 20%)
- Комплект ограждений (высота 2 м) + датчики безопасности + световые индикаторы — 65 487 ¥ (включая НДС 20%)
- Интеграция комплекса (кабели, шланги, разъемы, кронштейны) + пусконаладочные работы + обучение персонала — 56 425 ¥ (включая НДС 20%)
Общая стоимость: 878 807 ¥ (включая НДС 20%) *







