Паллетирование
- Главная
/ Паллетирование

31 Января 2024
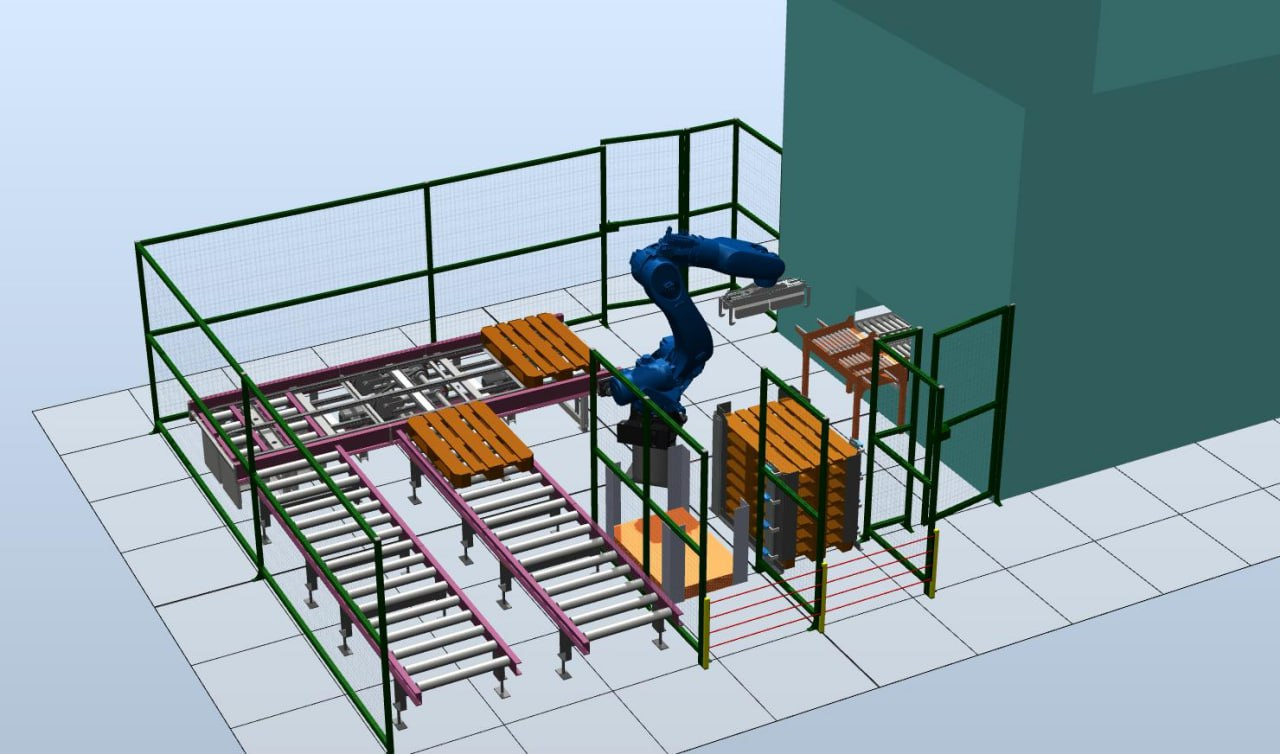
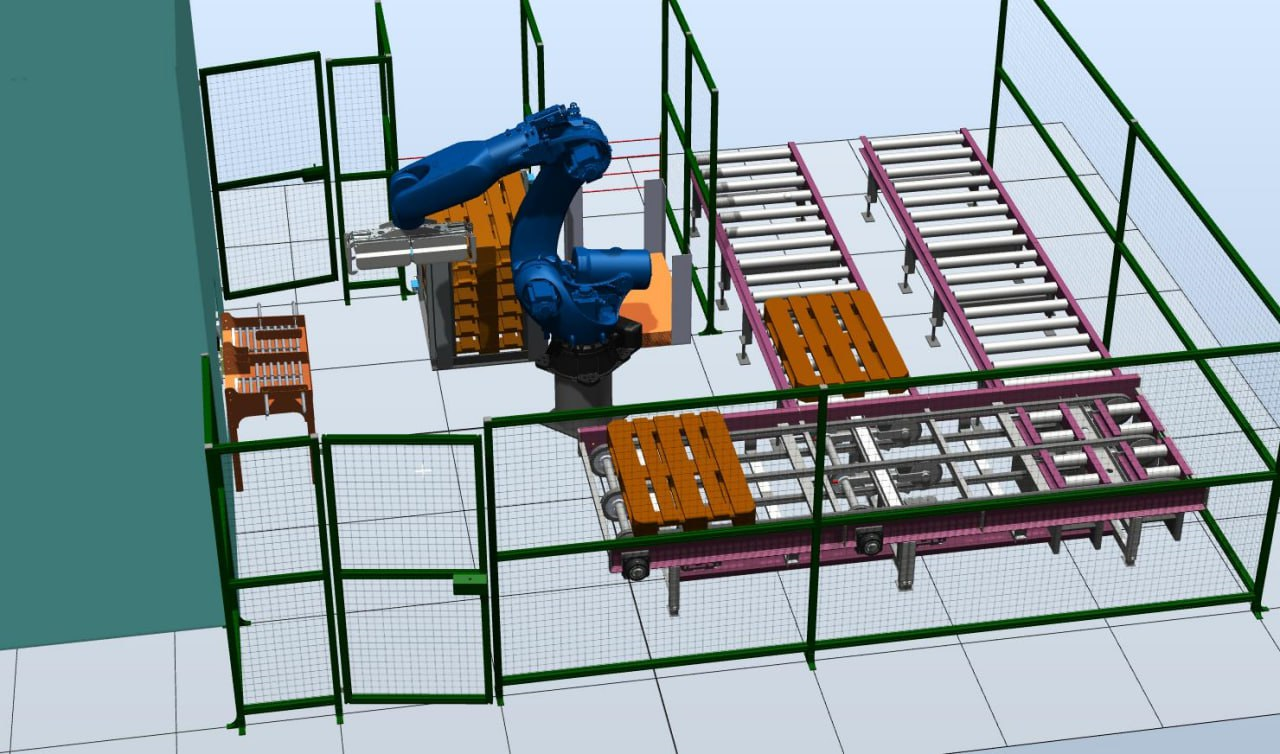
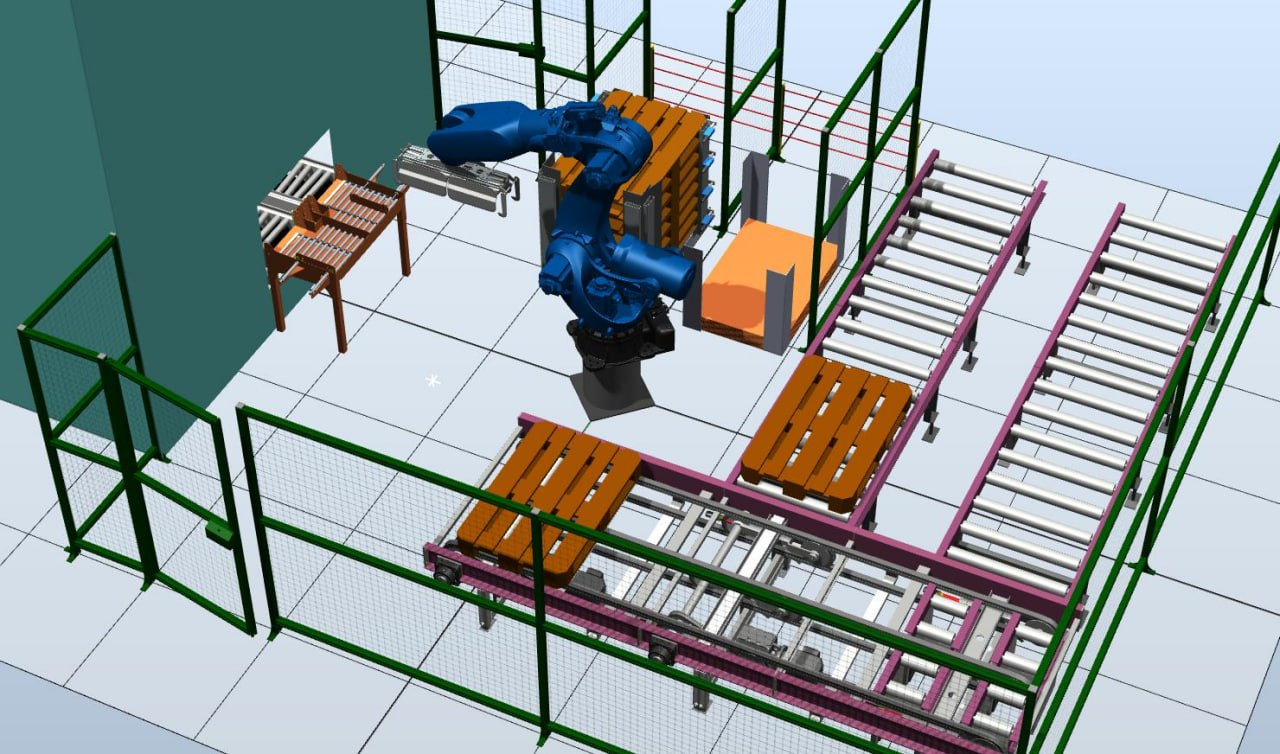
Состав универсального комплекса по роботизированной перекладке
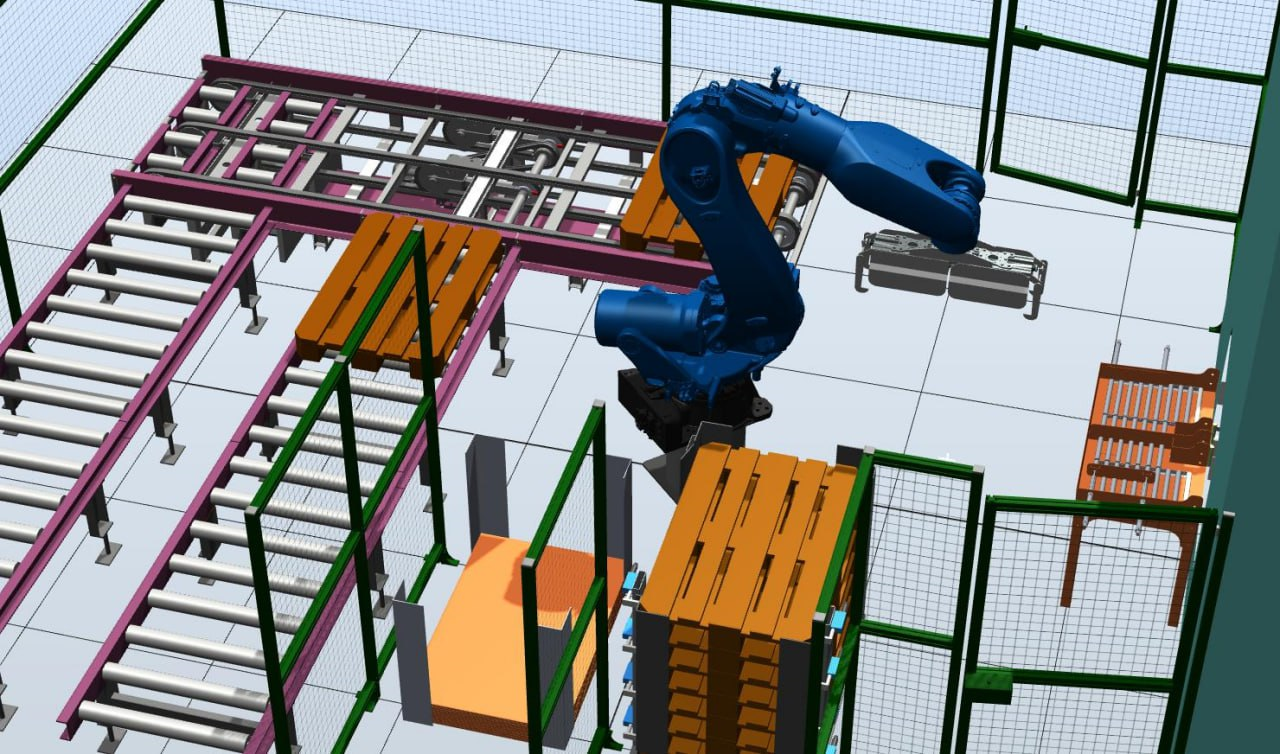
Комплекс для автоматической перекладки коробов на паллеты с сортировкой по двум потокам, считыванием кода и подачей паллет из магазина.
Подача паллет → Подача картонного листа → Сканирование коробки → Сортировка по транспортеру → Буфер и ориентация → Захват 1–2 коробок → Укладка на паллету → Выдача паллеты на разгрузку
Промышленный робот-манипулятор CRP-RA27-80
Промышленный робот CRP-RA27-80 — роботизированное устройство с рабочей зоной до 2680 мм. Предназначен для сварки, фрезерования, сборки, перемещения, шлифовки, лазерной и плазменной резки.
Преимущества
- длина руки 2680 мм и допустимая нагрузка 80 кг позволяют работать с большинством изделий на малых, средних и крупных производствах
- высокая скорость и точность подходят для процессов: сварка, покраска, погрузо-разгрузочные работы, транспортировка, сортировка и т.д.
- независимый аварийный выключатель обеспечивает безопасность оператора
- кабели повышенной гибкости дают стабильную работу в любых положениях
Технические характеристики
- Форма руки: вертикальный узловой шарнир
- Степень подвижности: 6 осей
- Максимальная нагрузка: 80 кг
- Точность повторного позиционирования: ±0,08 мм
- Максимальный охват: 2680 мм
- Вес робота: 728 кг
- Способ крепления: к поверхности пола
Диапазон движения по осям
- Ось 1: -180°…180°
- Ось 2: -160°…75°
- Ось 3: -80°…165°
- Ось 4: -170°…170°
- Ось 5: -225°…35°
- Ось 6: -360°…360°
Максимальная скорость движения по осям
- Ось 1: 65°/сек
- Ось 2: 62°/сек
- Ось 3: 62°/сек
- Ось 4: 110°/сек
- Ось 5: 90°/сек
- Ось 6: 140°/сек
Допустимый крутящий момент
- Ось 4: 231 Н·м
- Ось 5: 231 Н·м
- Ось 6: 135 Н·м
Допустимый инерционный момент
- Ось 4: 27,34 кг/м²
- Ось 5: 27,34 кг/м²
- Ось 6: 12,30 кг/м²
Требования к условиям использования
- Средняя температура: 0…45°C
- Относительная влажность: 20–85% (без конденсата)
- Вибрации: < 0,5 G
- Другие: робот должен быть установлен вдали от горючих или коррозионных жидкостей и газов, источников электрических помех
- Класс IP: оси J1–J4: IP54, оси J5–J6: IP67
Шкаф электроавтоматики G4 и пульт обучения робота
Продуманная система управления оптимизирует траекторию движения, ускорения и замедления робота, а также правильно распределяет нагрузку между осями. Это помогает сократить время перемещений и эффективно работать в цикле многие годы.
Управление роботом осуществляет контроллер ARM+DSP+FPGA, способный управлять 10 осями и обрабатывать до 500 млн операций/сек. За счет этого робот выполняет основные задачи и одновременно управляет периферийными устройствами.
Контроллер поддерживает протоколы связи с внешними устройствами: Ethernet, RS232, RS485, CAN, DeviceNet — можно подключать практически любое внешнее оборудование.
Пульт управления — рабочий интерфейс робота. Для безопасности на пульте расположены кнопки аварийной остановки. Конструкция сделана из высокопрочного пластика и имеет эргономичный дизайн.
Технические характеристики (пульт и управление)
- Пульт обучения: 8" сенсорный экран, переключатель режимов работы, аварийный выключатель, кнопка аварийного отключения
- Память: 200 МБ
- Управляемые оси: 6 осей робота + 4 дополнительные оси
- Интерфейс: цифровой модуль 22 входа/22 выхода; аналоговый модуль 4 выхода / Com / Ethernet
- USB: 2 порта
- Режимы работы: обучение, воспроизведение, автоматический
- Функции движения: точка-точка, прямая линия, окружность
- Система управления: движением, логическая, процессом
- Система координат: декартовы, базовые, пользовательские, координаты инструмента
- Система диагностики: диагностика аварийных остановок, временной последовательности управления, сервоприводов, отклонений процесса обучения, работы пользователя, точечной и дуговой сварки
- Безопасность: предусмотрено подключение внешних систем безопасности, механические ограничители
- Специальный интерфейс: интерфейс дуговой сварки, интерфейс рабочей станции
- ПО: сварка, транспортировка, паллетирование, покраска и т.д.
- Соединительные кабеля: 3 метра
- Питание: 3 фазы 380В AC 50–60 Гц
- Габариты: 550×785×410 мм
- Масса контроллера: 65 кг
- Прочее: встроенный ПЛК, контроль дуги по току (опция), ПО лазерного слежения (опция), система технического зрения (опция)
Единый блок управления роботом CRP CD60-CRX8
В единый блок CD60-CRX8 интегрированы контроллер робота вместе с синхронным сервоприводом, а также специальные контактные выходы для задач транспортировки, сварки, покраски, полировки и др.
Предусмотрено расширение до 8 осей при использовании двух дополнительных осей внешнего устройства позиционирования. Стандартная шина может быть расширена до промышленной сети.
Технические характеристики
- Источник питания: 3 фазы AC220В ±15% 50/60 Гц
- Мощность трансформатора: 3 кВА (нагрузка робота 6 кг) / 5 кВА (нагрузка робота 20 кг)
- Кол-во подключаемых осей: 2
- Подходящий тип робота: с нагрузкой от 6 кг до 20 кг, 4–6 осей
- Подходящий двигатель: двигатели с кодировщиками TAMAGAWA, двигатели HCFA
- Цифровые выходы: USB, Ethernet, RS232, RS485
- Аналоговые выходы: четырехканальный D/A
- Специальные выходы: анти-столкновение, выключатель техобслуживания, безопасная скорость, интерфейс дуговой сварки, интерфейс рабочего места
- Стандартные вводы/выводы: 22 входа/22 выхода
- Программный пакет: сварка, транспортировка, паллетирование, покраска и т.д. (на выбор)
- Пульт обучения: TPHK80-C
- Прочее: рекуперация, встроенный ПЛК, интерфейс кодера, отслеживание дуги (опция), ПО для лазерного отслеживания (опция), визуальный контроль (опция)
Сервомоторы и редукторы
Серводвигатели HCFA — надёжные двигатели, которые устанавливаются на соответствующие оси робота в зависимости от модели.
Циклоидальный и волновой редукторы обеспечивают стабильный привод и длительный срок службы. Двухступенчатая редукторная схема делает работу более устойчивой и снижает нагрузку на подшипники.
Транспортер для паллет
Транспортер позволяет загружать паллеты и перемещать их с одного потока на другой. Система управляется при помощи ПЛК и связана с роботом.
Затор исключен благодаря независимости линий — с цепной части транспортера паллета может быть перемещена только на один роликовый транспортер.
Преимущества
- высокая надежность конструкции
- транспортирование габаритных и тяжелых грузов
- транспортирование грузов с высокой температурой
- простота в обслуживании
- низкая стоимость
Технические характеристики
- Длина цепной части: 4000 мм
- Длина роликовой части: 4000 мм
- Высота загрузки/выгрузки: опционально
- Материал конструкции: сталь конструкционная
- Покрытие: серый (RAL7016)
- Электрическая часть: мотор-редуктор, 380 В, IP54
- Грузоподъемность: 2000 кг
Пневмомеханический захват для переноса паллет и коробок
Конфигурация захвата позволяет переносить паллеты и коробки массой до 40 кг, а также подбирать картонные листы с помощью вакуумных присосок.
Плунжеры с присосками «выбрасываются» только в момент подъема картонного листа. Всё остальное время они спрятаны и не мешают подбору коробок.
Описание технологического процесса
Оператор подвозит стопку паллет и устанавливает в магазин, после чего стопка выравнивается. Для выравнивания используется независимая система пневмоцилиндров, расположенная через каждые две паллеты. Это гарантирует выправление всей стопки путем прижатия к базе и исключает ситуации, когда нижняя паллета смещена относительно верхней.
Рядом с накопителем паллет расположен накопитель картонных листов. Робот поднимает картонный лист выбрасываемыми присосками на захвате и переносит на паллету. После этого паллета с листом переносится тем же захватом на транспортер — уже с использованием крючьев для подъема паллеты.
Транспортер паллет предполагает установку паллет в двух местах, независимых друг от друга. Слипание листов исключается вертикально установленными щетками.
Продукция, перемещаясь по транспортеру, проходит через участок считывания кода с коробки. После считывания кода коробка выталкивается селектором на один из двух транспортеров продукции и движется к буферному участку, где выравнивается и смещается в сторону.
Буферный участок позволяет правильно сориентировать две коробки для дальнейшего подъема роботом. Следующие за ними коробки отсекаются на время, пока робот не заберет две подготовленные для переноса коробки. Во избежание заторов используются шариковые рольганги.
Захват на роботе позволяет выполнять подъем одной или двух коробок сразу, которые затем переносятся на одну из паллет по заранее выбранной схеме.
По окончании укладки коробок на паллет робот перемещается за новой паллетой, а паллета с продукцией начинает движение к точке разгрузки.
Для оператора управление участком реализуется через панель HMI.
Цены и комплектация
-
Промышленный робот-манипулятор CRP-RA27-80 + шкаф управления
Стоимость: 138 348 EUR (включая НДС 20%) -
Пневмомеханический захват
-
Транспортеры для перемещения паллет
Транспортеры для перемещения продукции -
Буфер для накопления продукции
-
Промышленный сканер Datalogic
-
Магазин для накопления паллет
-
Магазин для накопления картонных листов
-
Тумба для робота
-
HMI панель — 2 шт.
-
Комплект ограждений высотой 2 метра, включая датчики безопасности, световые индикаторы и т.д.
-
Интеграция оборудования в единый комплекс, включая кабели, шланги, разъемы и кронштейны
Пусконаладочные работы на территории заказчика, обучение персонала.
Общая стоимость: 138 348 EUR (включая НДС 20%) *







