Паллетирование
- Главная
/ Паллетирование

10 Апреля 2025
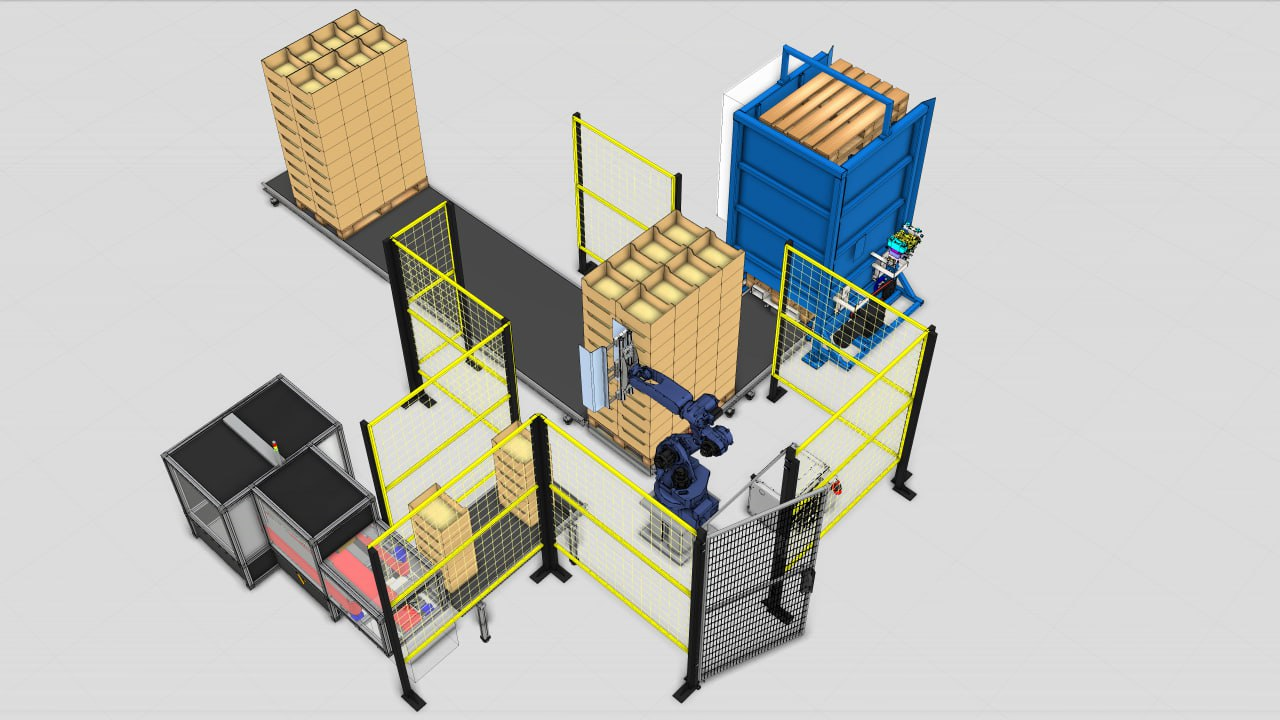
Роботизированный комплекс паллетирования гофрокоробов
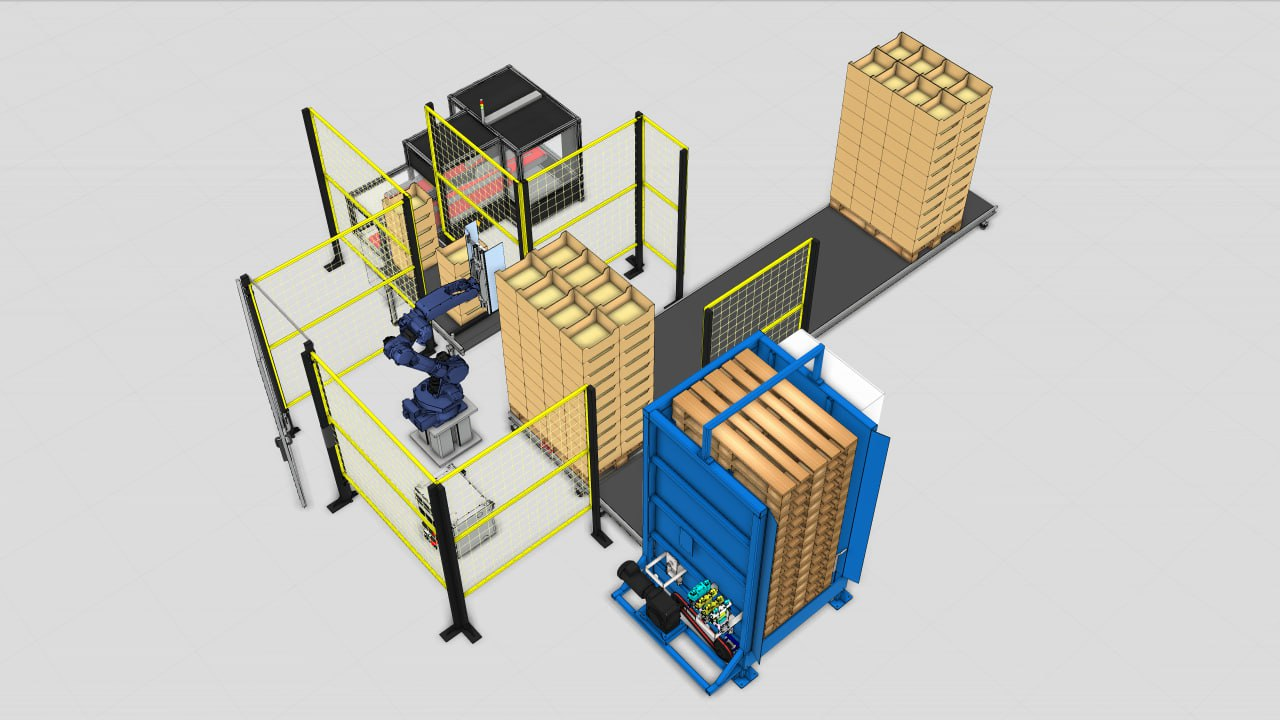
Роботизированный комплекс выдачи гофрокоробов
Участок выдачи гофрокоробов обслуживается промышленным роботом с пневмозахватом, а также диспенсером паллет и выходным транспортером.
Подача паллеты → Укладка коробов роботом → Выдача заполненной паллеты → Подача следующей паллеты → Повтор цикла
Промышленный шестиосевой робот Yaskawa Motoman GP25
Yaskawa Motoman GP25 — универсальный шестиосевой промышленный робот с полезной нагрузкой до 25 кг и радиусом действия 1802 мм. Модель обеспечивает короткое время рабочего цикла и высокую повторяемость.
Компактный дизайн позволяет использовать робота в процессах обработки заготовок, загрузки/разгрузки станка и т.п. Благодаря запястью с защитой IP67, робот подходит для операций механической обработки или шлифования.
В сочетании с пультом управления SmartPendant робот удобно интегрируется в автоматизированные среды.
Технические характеристики
- Количество осей: 6
- Максимальная грузоподъемность: 25 кг
- Повторяемость: 0,02 мм
- Максимальная досягаемость: 1730 мм
- Температурный режим: 0º…+45ºC
- Допустимая влажность: 20–80%
- Масса: 250 кг
- Номинальная мощность: 2 кВт
Оси и скорости
- Ось S: ±180º, 210º/сек
- Ось L: +155º/-105º, 210º/сек
- Ось U: +160º/-86º, 265º/сек
- Ось R: ±200º, 420º/сек, момент 52 Н·м, инерция 2,3 кг/м²
- Ось B: ±140º, 420º/сек, момент 52 Н·м, инерция 2,3 кг/м²
- Ось T: ±455º, 885º/сек, момент 32 Н·м, инерция 1,2 кг/м²
Контроллер Yaskawa Motoman YRC1000
YRC1000 — компактная и мощная многозадачная платформа контроллера для роботов и периферийных устройств (позиционеры, линейные оси и порталы), координирующая движение до 8 роботов и дополнительных внешних осей (в общей сложности до 72).
Контроллер обычно поставляется со стандартным пультом программирования робота: сенсорный дисплей, горячие клавиши, быстрое обучение позиций и изменение параметров. Структуры программ строятся на простых строковых операторах. Язык высокого уровня Inform III используется для логики управления и сложных функций.
Быстрый многозадачный процессор, современная ОС и высокоскоростные сервоприводы обеспечивают высокие ускорения, скорости вращения осей и хорошие характеристики траектории.
Функция Advanced Robot Motion (ARM) динамически рассчитывает и контролирует крутящий момент и нагрузку на оси, оптимизирует ускорение и скорость, устраняет вибрации, быстро корректирует положение целевой координаты и обеспечивает обнаружение коллизий.
Интегрированный мягкий ПЛК может использоваться для управления периферийными устройствами или небольшими производственными ячейками.
Контроллер поддерживает интеграцию в производственные сети: стандартные коммуникационные интерфейсы (например, два порта Ethernet, цифровые входы/выходы), web-сервер TCP/IP с поддержкой FTP для удаленного мониторинга и обслуживания через Web. Также поддерживается OPC/UA и промышленные протоколы связи.
Пневмомеханический захват для гофрокоробов
Разработан и изготовлен для механического/фрикционного захвата продукта с двух сторон. Удобное решение, когда захват сверху невозможен.
Подходит для перемещения продукции в коробках, ящиках, в полиэтиленовой пленке, а также для перемещения тонкостенной упаковки различных форм.
Автоматический диспенсер паллет
Диспенсер паллет — автономное устройство, встраиваемое в конвейерную линию. Стопка пустых паллет загружается в диспенсер, после чего паллеты выдаются на конвейер по одной. Устройство может работать в режиме накопления — собирать пустые паллеты в стопки после растаривания.
Магазин паллет решает несколько задач: паллета на конвейере имеет строгую ориентацию, повышается производительность и безопасность линии, облегчается труд персонала и экономится моторесурс складской техники.
- Загрузка: паллеты загружаются по одной или стопкой
- Выдача: устройство опускает стопку и подает паллеты поштучно
- Накопление: положение паллет меняется, чтобы создать место для формирования стопки
Технические характеристики
- Производительность: 150 паллет/час
- Грузоподъемность: 675 кг
- Потребляемая электрическая мощность: 0,06 кВт
- Расход воздуха: 10 м³/ч
- Рабочее давление воздуха: 6–8 бар
- Макс. кол-во паллет в пачке: 15 шт.
Описание технологического процесса
По сигналу от робота паллета поступает на место ее загрузки. Робот перемещает стопки коробов на паллету. По окончании загрузки паллета перемещается по транспортеру за границы участка. На ее место диспенсер подает следующую паллету. Цикл повторяется.
Цены и комплектация
-
Промышленный робот-манипулятор Yaskawa Motoman GP25
Контроллер Yaskawa Motoman YRC 1000
Стоимость: 673 746,00 CNY (включая НДС 20%) -
Пневмомеханический захват
-
Автоматический диспенсер для паллет
-
Блок управления пневматикой
-
Приводной транспортер для паллет
-
Комплект ограждений высотой 2 метра, включая датчики безопасности, световые индикаторы и т.д.
-
Интеграция оборудования в единый комплекс, включая кабели, шланги, разъемы и кронштейны
Пусконаладочные работы на территории заказчика, обучение персонала
Общая стоимость: 673 746,00 CNY (включая НДС 20%) *
Общая стоимость в рублях по курсу ЦБ РФ на 10.04.2025: 7 842 403,44 руб. (включая НДС 20%) *







