Паллетирование
- Главная
/ Паллетирование

22 Января 2025
Роботизированный комплекс паллетирования гофрокоробов
Комплекс для автоматической укладки коробов на паллеты с сортировкой по конвейерам, буферизацией на входе, подачей прокладочных листов и работой на два паллетоприёмника.
Подача коробов → Сканирование кода → Распределение по конвейерам → Буфер (4 короба) → Захват ряда роботом → Укладка на паллету → Световая индикация готовности паллеты
Промышленный робот Yaskawa Motoman PL190
Быстрый и мощный 4-осевой робот для паллетирования. Производительность — более 1700 циклов/час. Рабочая зона: максимальный вылет 3159 мм, высота штабелирования — более 2600 мм.
Конструкция компактная, не требует тяжелого противовеса. Кабели и пневмолинии для захватов можно прокладывать через оси и полое запястье.
Технические характеристики
- Количество осей: 4
- Максимальная грузоподъемность: 190 кг
- Повторяемость: ±0,05 мм
- Максимальная досягаемость: 3159 мм
- Температурный режим: 0º…+45ºC
- Допустимая влажность: 20–80%
- Масса: 1680 кг
- Номинальная мощность: 9,5 кВт
Оси и скорости
- Ось S: ±180°, 140°/сек
- Ось L: +90°/-45°, 145°/сек
- Ось U: +15,5°/-120°, 145°/сек
- Ось T: ±360°, 420°/сек
- Допустимый момент инерции (ось T): 90 кг/м²
Контроллер Yaskawa Motoman YRC 1000
Компактный и производительный контроллер для роботов и периферии (позиционеры, линейные оси, порталы). Координирует движение до 8 роботов и внешних осей (в сумме до 72).
Поддерживает быстрое обучение точек с пульта, расширенную логику на Inform III, удалённый мониторинг через Web/FTP и интеграцию в производственные сети, включая OPC/UA.
Функция ARM (Advanced Robot Motion) повышает точность траектории, снижает вибрации и улучшает обнаружение коллизий.
Пневмомеханический захват для гофрокоробов
Захват рассчитан на механический/фрикционный захват коробов с двух сторон. Это удобно, когда захват сверху невозможен.
Подходит для перемещения продукции в коробах/ящиках, упаковки в пленке, а также для тонкостенной тары и укладки прокладочных листов между слоями.
- Одновременный захват: до 4 коробок
- Максимальный вес одной коробки: до 30 кг
Промышленный сканер кодов
Сканер считывает код на коробах, после чего автоматика распределяет короб по нужному конвейеру выдачи, относящемуся к роботизированному участку.
Буферные узлы и бункер прокладочных листов
- Буферная зона каждого входного транспортера вмещает 4 короба
- Позиционирование коробов выполняется пневматическими поджимами
- Бункер прокладочных листов подаёт листы в зону работы робота для разделения слоёв
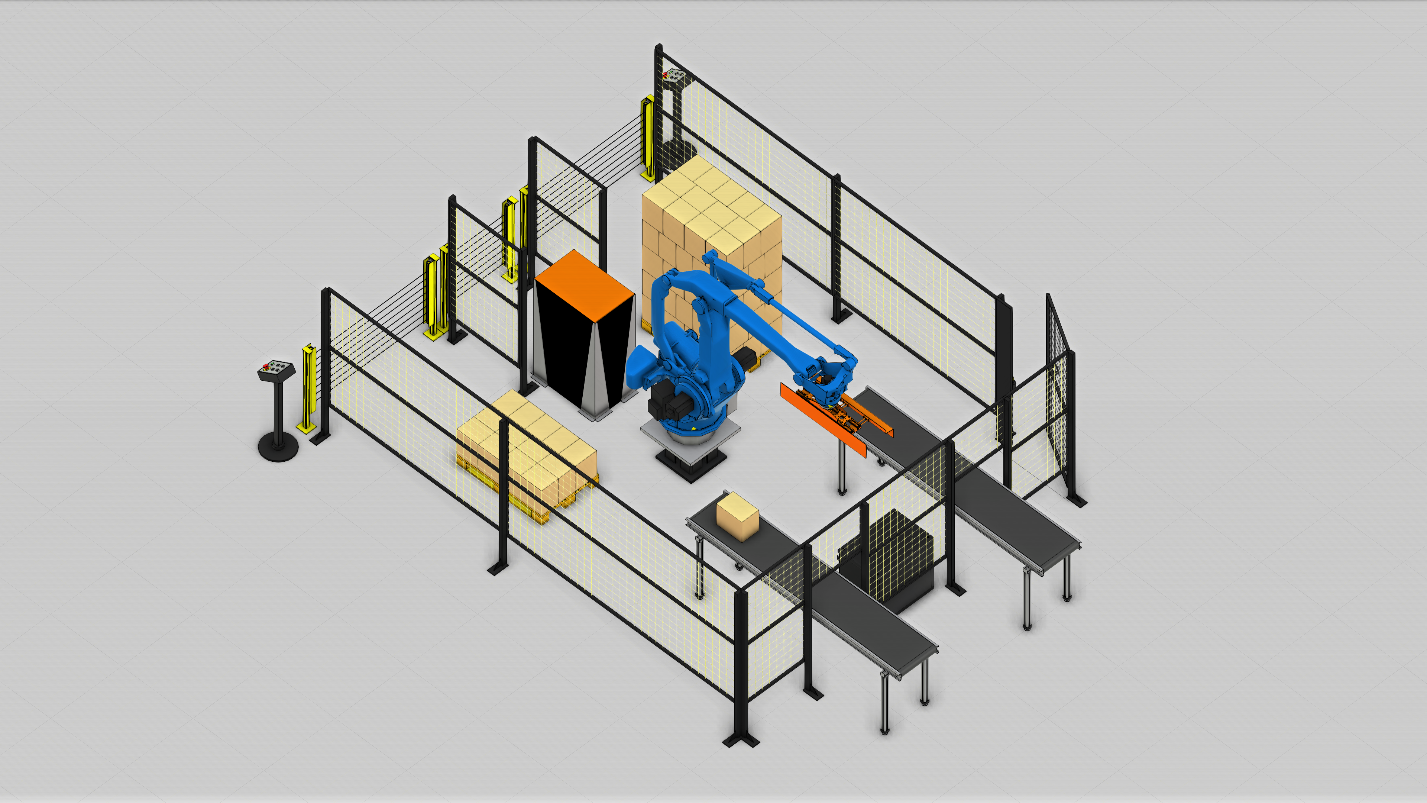
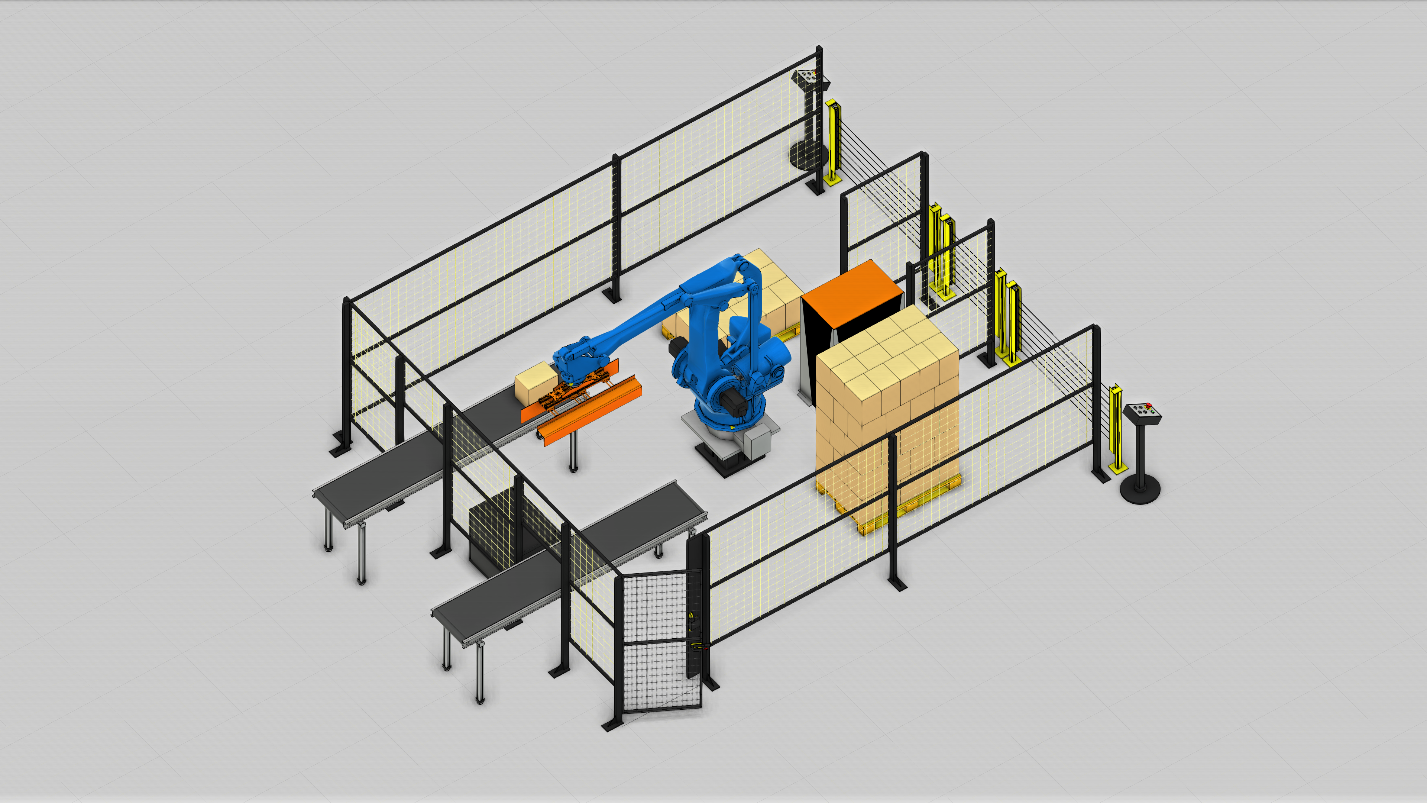
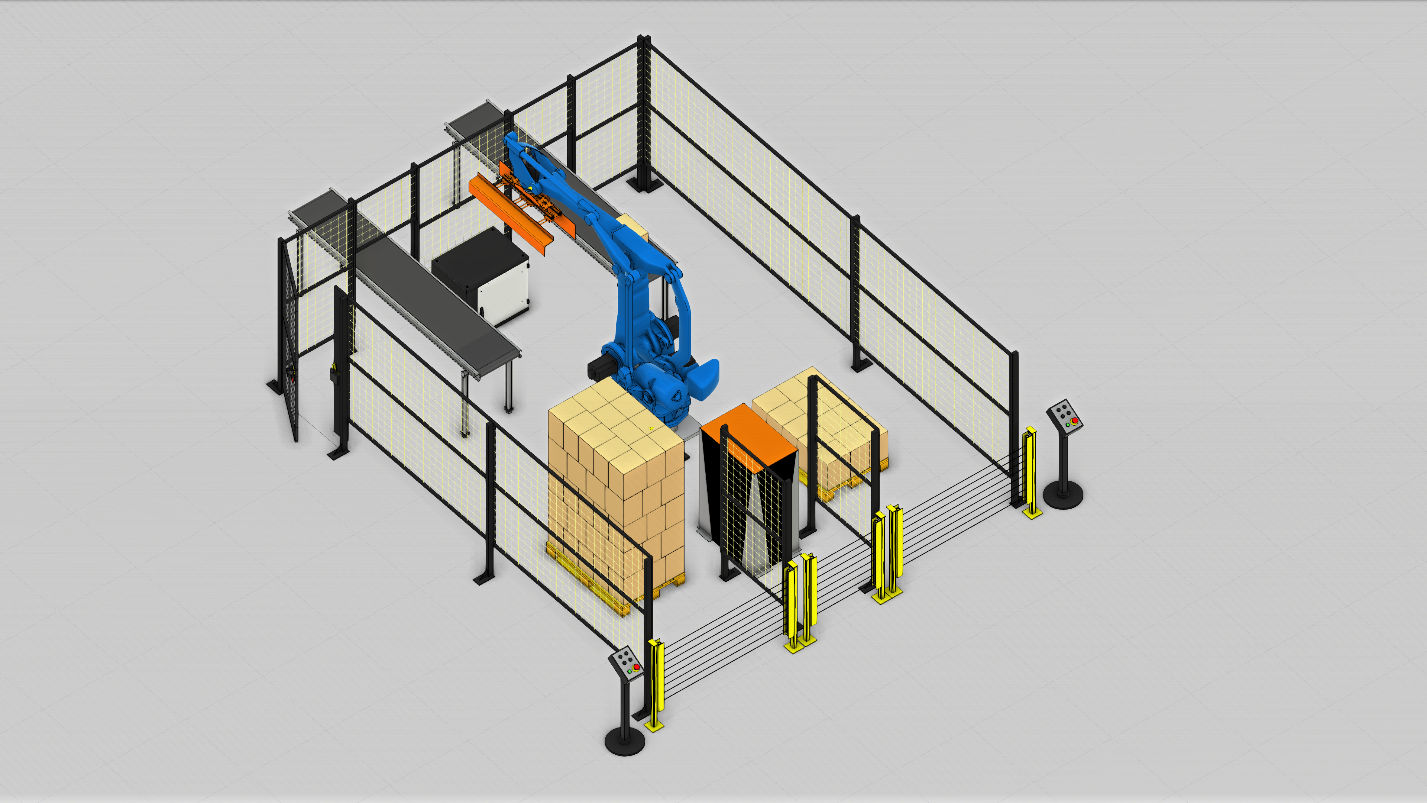
Описание технологического процесса
РТК — закрытый участок с роботом-паллетайзером, который обслуживает два транспортера, два паллетоприемника и накопитель с прокладочными листами.
Короба перемещаются по главному транспортеру и проходят участок сканирования. После считывания кода система распределяет продукцию на нужный транспортер выдачи.
Когда в буферной зоне накопится заданное количество коробов, роботу приходит сигнал, и он забирает сразу весь ряд и переносит его на паллету. По завершении сборки одной паллеты включается сигнал на световой стойке.
Цены и комплектация
-
Робот Yaskawa Motoman PL190 + контроллер YRC1000 — 836 457 ¥ (включая НДС 20%)
-
Пневмомеханический захват для коробов и прокладочных листов
-
Блок управления пневматикой
-
Промышленный сканер кодов
-
Блок подготовки воздуха
-
Буферный узел для приема коробов с продукцией — 2 шт.
-
Рамка для установки паллет — 2 шт.
-
Бункер для прокладочных листов
-
Система безопасности — 3 комплекта
-
Тумба для робота
-
Защитные ограждения
-
Интеграция оборудования в единый комплекс (кабели, шланги, разъемы, кронштейны)
- пусконаладочные работы на территории заказчика
- обучение персонала
Комплектов: 2 шт.
Общая стоимость: 1 672 914 ¥ (включая НДС 20%) *







