Паллетирование
- Главная
/ Паллетирование

20 Марта 2024
Состав универсального комплекса по паллетированию
Комплекс для автоматизированной загрузки брикетов в «биг бэги» с применением промышленных роботов, транспортеров и оснастки на каретках.
Установка биг бэга → Подтверждение → Подача каретки в зону робота → Загрузка брикетов → Возврат каретки оператору → Следующий биг бэг
Промышленный робот-манипулятор Yaskawa GP 35L
Yaskawa GP35L — универсальный шестиосевой промышленный робот с полезной нагрузкой 35 кг, увеличенным радиусом действия (2 538 мм) и высокой повторяемостью +/- 0,07 мм.
Робот дает хорошо сбалансированную комбинацию полезной нагрузки, скорости и допустимого момента на осях, что обеспечивает высокую скорость и ускорение. Небольшая занимаемая площадь и стройный дизайн требуют минимум пространства для установки и снижают помехи для периферийных устройств.
Доступна версия со степенью защиты IP65/67 (защита от пыли и жидкостей) для работы в неблагоприятных условиях.
GP35L подходит для широкого спектра применений: обработка, сборка, резка, аддитивные технологии и т.п.
Технические характеристики
- Количество осей: 6
- Максимальная грузоподъемность: 35 кг
- Повторяемость: 0,07 мм
- Досягаемость: 2 538 мм
- Рабочий температурный режим: 0º…+45ºС
- Масса: 600 кг
- Номинальная мощность: 4 кВт
Оси и параметры движения
- Ось S: диапазон ±180º, скорость 180º/сек
- Ось L: диапазон +135º/-90º, скорость 140º/сек
- Ось U: диапазон +206º/-80º, скорость 178º/сек
- Ось R: диапазон ±360º, скорость 250º/сек, момент 147 Н·м, инерция 10 кг/м²
- Ось B: диапазон ±125º, скорость 250º/сек, момент 147 Н·м, инерция 10 кг/м²
- Ось T: диапазон ±360º, скорость 360º/сек, момент 78 Н·м, инерция 4 кг/м²
Контроллер и пульт Yaskawa Motoman YRC 1000
Yaskawa Motoman YRC 1000 — компактная и мощная многозадачная платформа контроллера для роботов и периферийных устройств (позиционеры, линейные оси, порталы), координирующая движение до 8 роботов (главный/подчиненный) и дополнительных внешних осей (в общей сложности до 72).
Концепция работы роботов Motoman развивалась и оптимизировалась много лет на основе большого опыта установок. Обычно YRC 1000 поставляется со стандартным пультом программирования робота с сенсорным дисплеем и горячими клавишами, что дает быстрое программирование позиций и изменение параметров.
Понятные структуры программ строятся с помощью простых операторов на основе строк. С использованием языка высокого уровня Inform III можно применять мощные команды, логику управления и создавать сложные функции управления движением или связью. Управление правами пользователей основано на системе USB Stick.
Быстрый многозадачный процессор, современная операционная система и высокоскоростные сервоприводы обеспечивают высокие ускорения, скорости вращения осей и хорошие характеристики траектории.
Многозадачная ОС с быстрым интерполяционным циклом не требует защиты от вирусов. Время загрузки — меньше сорока секунд.
Функция Advanced Robot Motion (ARM) динамически рассчитывает и контролирует крутящий момент и нагрузку на оси, оптимизирует ускорение и скорость, устраняет вибрации, быстро корректирует положение целевой координаты и обеспечивает высокочувствительное обнаружение коллизий.
Интегрированный быстрый мягкий ПЛК, тесно взаимодействующий с программными входами/выходами робота, может использоваться для управления периферийными устройствами или небольшими производственными ячейками и, в перспективе, может сделать контроллер ячейки ПЛК ненужным в простых комплексах.
Контроллер оснащен стандартными коммуникационными интерфейсами (например, двумя портами Ethernet и цифровыми входами/выходами), а также функцией web-сервера TCP/IP с поддержкой FTP для считывания/настройки состояния контроллера и удаленного мониторинга/обслуживания через Web.
Также поддерживаются интерфейсы и протоколы связи для цифровой фабрики/Индустрии 4.0, например, OPC/UA (поддерживает спецификацию VDMA Robotics Companion Specification).
Поддерживаются промышленные сети: Profinet, Devicenet, ASI-Bus, Profibus, EthernetIP, ModbusTCP, CCLink, EtherCAT (включая варианты шин безопасности), а также специфические интерфейсы (например, Euromap или Varan). Доступны интерфейсы для периферийных устройств: захваты, системы 2D/3D-видения, датчики силы/крутящего момента, интеграция HMI и т.п.
Роботы с контроллерами YRC1000 поддерживают разные методы программирования (по смыслу исходника):
- стандартный обучающий пульт (сенсорный), Smart Pendant
- функциональные блоки Motologix для интеграции в ПЛК-среды IEC 61131
- программный комплекс на базе ПК
- offline-моделирование MotoSimVRC (OLP)
- сторонние offline-инструменты (OLP) и решения Digital Twin
- приложения и мастера (Welding Wizard, PalletSolver, Motologix)
- CAD/CAM-инструменты (G-код через постпроцессоры)
- операционная система ROS
- сторонние среды программирования роботов
- API-интерфейсы для Matlab / LabView
- машинное зрение, подборка контейнеров, ИИ/нейросети
- обучающие ручки/перчатки
- пользовательские приложения/визуализации/HMI через SDK (Motoplus C/C++, MotoCom32 SDK)
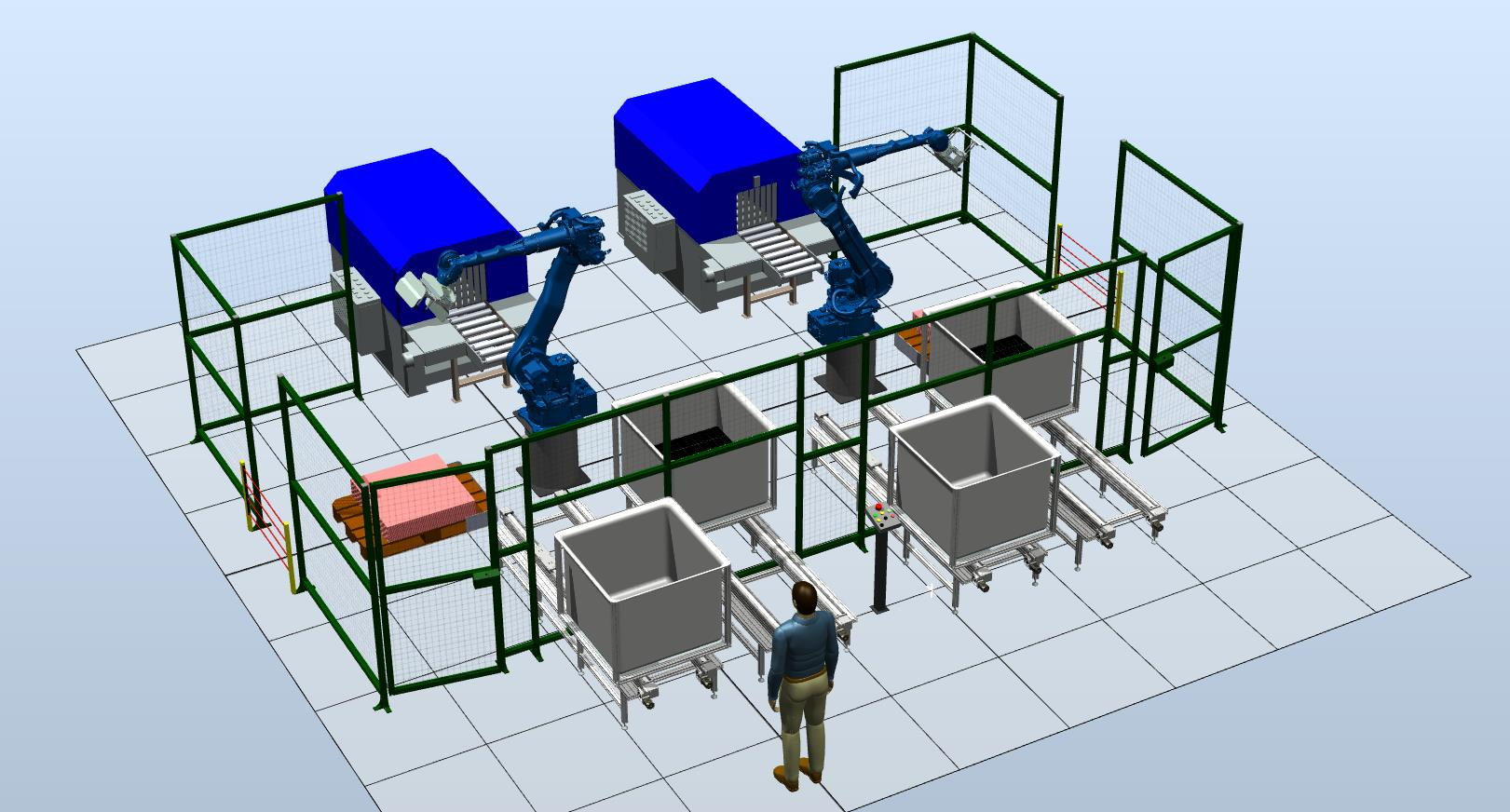
Описание технического процесса
РТК представляет собой участок с двумя промышленными роботами, обслуживающими две линии выдачи продукции. В зону досягаемости каждого робота подводятся по два транспортера с каретками, на которых располагается оснастка для установки «биг бэга». Такое количество оборудования позволяет максимально оптимизировать загрузку брикетов в «биг бэги» и исключить скопление.
Оператор устанавливает «биг бэг» на оснастку, подтверждает его установку, и каретка с «биг бэгом» отправляется в зону загрузки роботом. Робот приступает к загрузке, начиная с центра и смещаясь к стенкам.
В это время оператор устанавливает «биг бэг» на оснастку второй каретки и может отправить ее к роботу в очередь на загрузку. Установка «биг бэга» потребует расправления его внутреннего п/э вкладыша вручную.
По окончании загрузки каретка с заполненным «биг бэгом» возвращается обратно к оператору, и робот сразу приступает к загрузке нового «биг бэга».
Цены и комплектация
-
Промышленный робот-манипулятор Yaskawa GP 35L — 2 шт.
Стоимость: 18 232 270 руб. (Включая НДС 20%) -
Контроллер и пульт Yaskawa Motoman YRC 1000 — 2 шт.
-
Блок управления пневматикой
-
Пневмомеханический захват — 2 шт.
-
Чехол для робота — 2 шт.
-
Транспортеры для биг бэгов — 4 шт.
-
Доработка выходных транспортеров заказчика
-
Ограждения
-
Система безопасности
-
Обучение персонала
-
Интеграция вышеперечисленного оборудования в единый комплекс, включая все необходимые кабели, шланги, разъемы и кронштейны
- пусконаладочные работы на территории заказчика
Общая стоимость: 18 232 270 руб. (Включая НДС 20%) *







