Обслуживание станков
- Главная
/ Обслуживание станков

24 Июля 2025
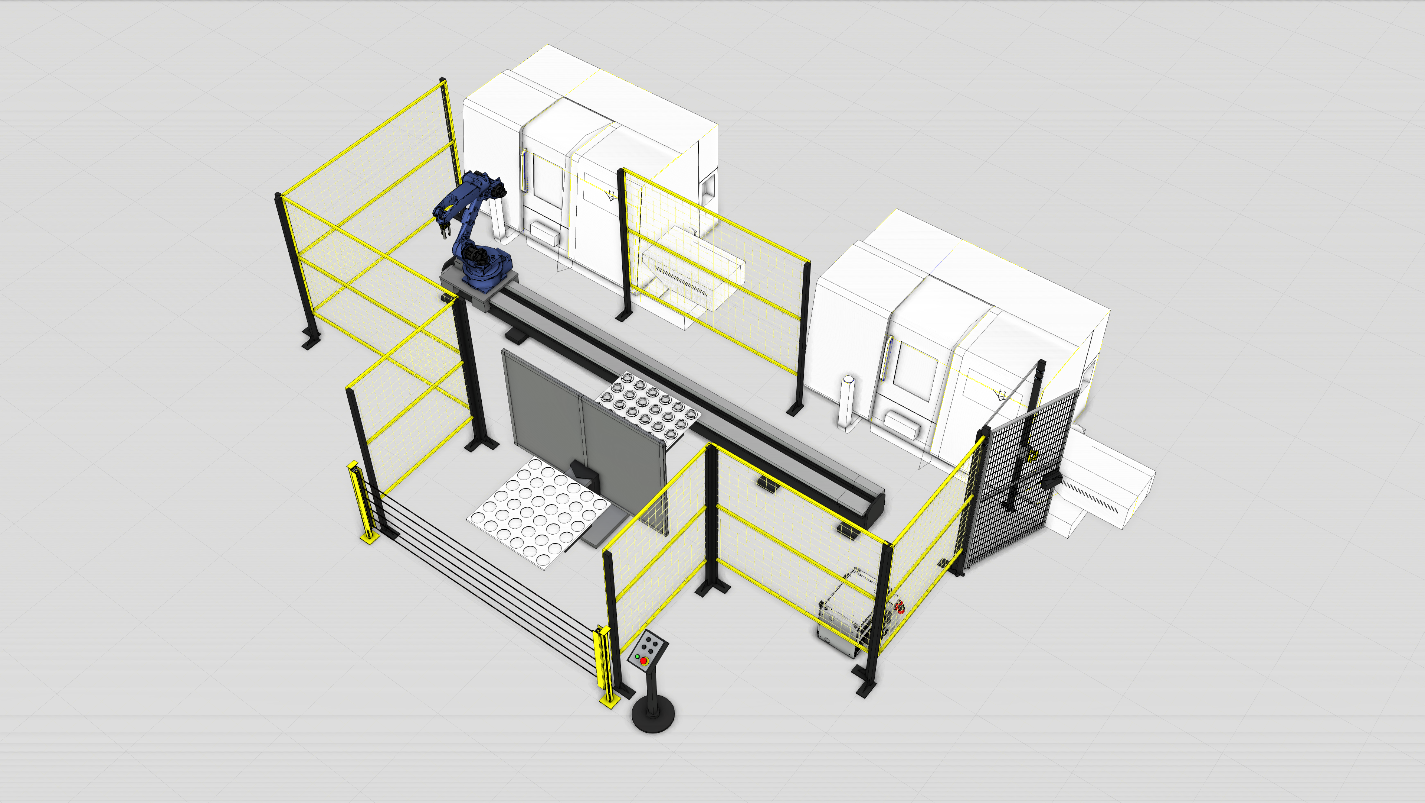
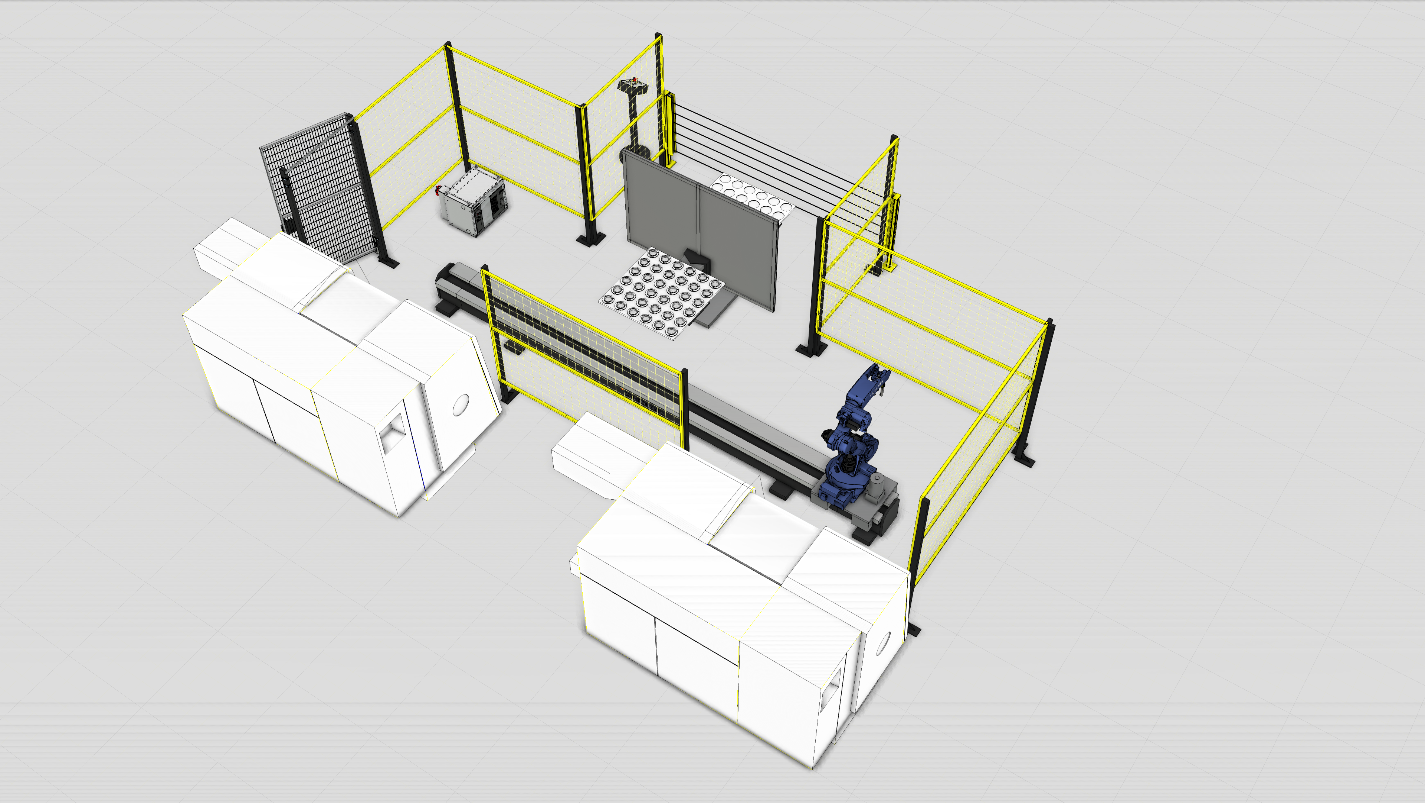
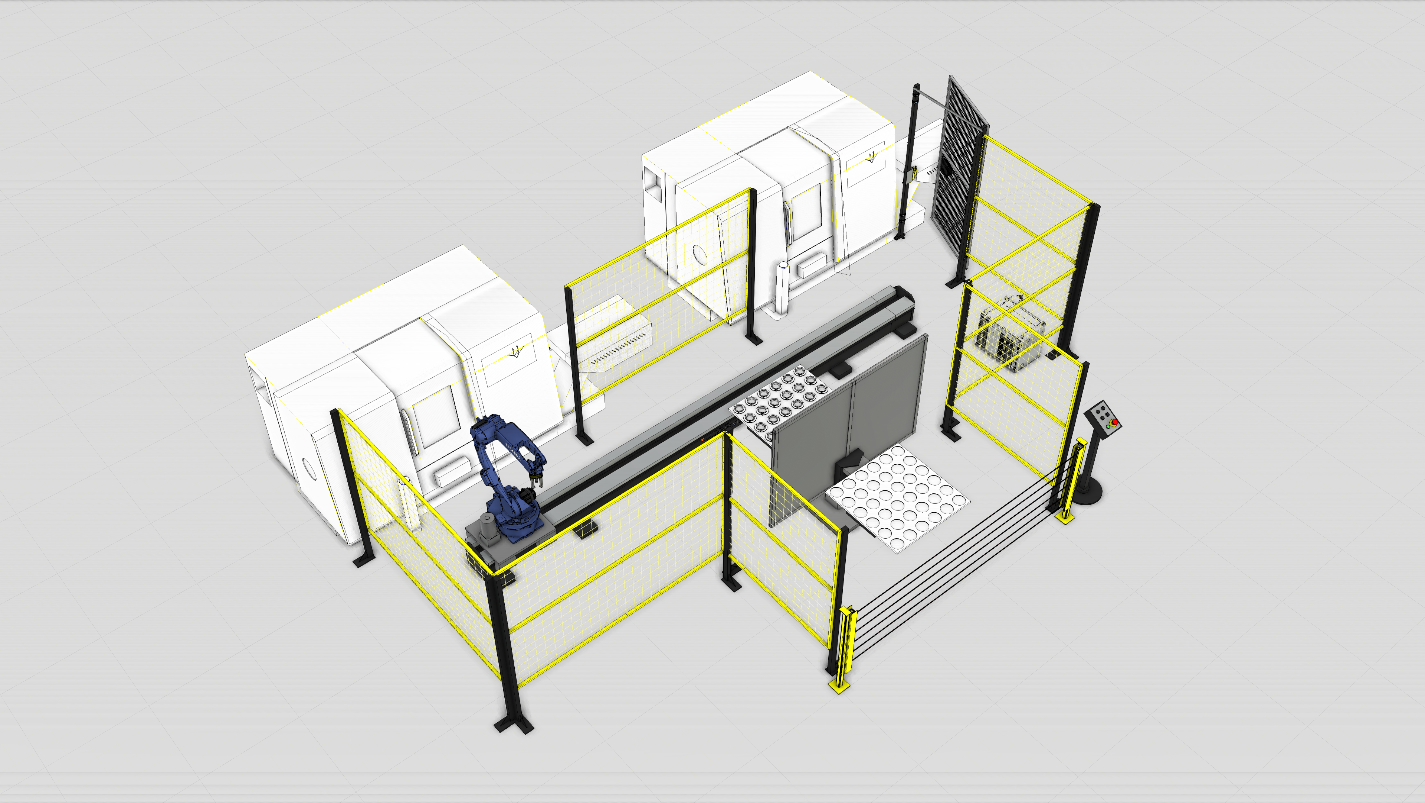
Роботизированный комплекс загрузки-разгрузки
РТК — огороженная ячейка из двух станков, обслуживаемых промышленным роботом на линейной оси, и поворотного стола для накопления/подачи заготовок.
 Загрузка заготовок → Подтверждение готовности → Поворот стола 180° →
Обслуживание станков роботом → Возврат деталей → Следующий цикл
Загрузка заготовок → Подтверждение готовности → Поворот стола 180° →
Обслуживание станков роботом → Возврат деталей → Следующий цикл
Промышленный робот-манипулятор Yaskawa GP25
Yaskawa Motoman GP25 — универсальный шестиосевой промышленный робот с полезной нагрузкой до 25 кг и радиусом действия до 1802 мм. Обеспечивает короткое время цикла и высокую повторяемость.
Компактная конструкция подходит для обработки заготовок, загрузки/разгрузки станка и похожих задач. Запястье с защитой IP67 хорошо подходит для операций мехобработки или шлифования.
Технические характеристики
- Количество осей: 6
- Максимальная грузоподъемность: 25 кг
- Повторяемость: 0,02 мм
- Максимальная досягаемость: 1730 мм
- Температурный режим: 0…+45 °C
- Допустимая влажность: 20–80%
- Масса: 250 кг
- Номинальная мощность: 2 кВт
Оси и скорости
- Ось S: диапазон ±180°, скорость 210°/сек
- Ось L: диапазон +155° / -105°, скорость 210°/сек
- Ось U: диапазон +160° / -86°, скорость 265°/сек
- Ось R: диапазон ±200°, скорость 420°/сек, момент 52 Н·м, инерция 2,3 кг/м²
- Ось B: диапазон ±140°, скорость 420°/сек, момент 52 Н·м, инерция 2,3 кг/м²
- Ось T: диапазон ±455°, скорость 885°/сек, момент 32 Н·м, инерция 1,2 кг/м²
Линейная ось Yaskawa
Напольная линейная ось с сервоприводом и кареткой, позволяющей перемещать одного или двух роботов, что заметно расширяет рабочий диапазон.
Технические характеристики
- Максимальная грузоподъемность: 1000
- Максимальная скорость: 1,2 м/с
- Ускорение: 1 м/с²
- Точность позиционирования: ±0,1 мм
Одноосевой поворотный стол Yaskawa Motoman VMI-400
Двухпозиционный поворотный стол с сервоприводом и защитным экраном для перемещения деталей в рабочую зону. Сделан так, чтобы оператору было удобно загружать и выгружать детали, с подходящей рабочей высотой.
Технические характеристики
- Номинальная полезная нагрузка: 400 кг
- Высота загрузки: 675 мм
- Вес: 323 кг
Контроллер Yaskawa Motoman YRC 1000
YRC 1000 — компактная многозадачная платформа контроллера для роботов и периферии (позиционеры, линейные оси, порталы). Координирует движение до 8 роботов (главный/подчиненный) и дополнительных внешних осей (в сумме до 72).
Контроллер поставляется со стандартным пультом программирования: сенсорный дисплей, горячие клавиши, быстрое задание позиций и параметров. Структура программ простая и понятная. При необходимости используется язык высокого уровня Inform III для логики и сложных функций управления.
Производительность и точность движения
- Время загрузки: менее 40 секунд
- ARM (Advanced Robot Motion): динамический расчет и контроль крутящего момента/нагрузки, оптимизация ускорения и скорости, устранение вибраций, быстрая коррекция целевой координаты, чувствительное обнаружение коллизий
- Интегрированный мягкий ПЛК: управление периферией и небольшими ячейками (в простых комплексах может снизить потребность в отдельном ПЛК)
Интеграция и связь
Контроллер легко встраивается в существующие сети: стандартные интерфейсы (например, Ethernet, цифровые входы/выходы), web-доступ и удаленный мониторинг/обслуживание. Поддерживаются интерфейсы и протоколы для цифрового производства, включая OPC/UA (в т.ч. спецификация VDMA Robotics Companion Specification), а также набор промышленных шин и протоколов (Profinet, DeviceNet, Profibus, Ethernet/IP, ModbusTCP, EtherCAT и др., включая варианты safety).
Методы программирования и инструменты
- стандартный обучающий пульт (сенсорный)
- функциональные блоки для интеграции в ПЛК-среды IEC 61131 (Motologix)
- ПК-программирование
- offline-моделирование (MotoSimVRC и сторонние OLP / Digital Twin)
- приложения и мастера (например, Welding Wizard, PalletSolver, Motologix)
- CAD/CAM постпроцессоры (G-code)
- ROS и сторонние среды
- API/SDK (Motoplus C/C++, MotoCom32 SDK и т.п.)
- 2D/3D зрение, датчики силы/крутящего момента, ИИ/нейросети
Трехкулачковый пневматический захват Schunk PZN-plus 100-1
Трехкулачковый центрический захват высокого усилия. Высокий момент достигается за счет многореберных направляющих.
Захват может применяться в разных областях, в том числе там, где важна устойчивость к грязи, химии, перепадам температур и запыленности. Комплектуется периферийными принадлежностями (кронштейны, втулки, уплотнения, крышки, монтажные комплекты и т.д.).
Важно: максимально допустимая длина пальцев корректируется в зависимости от рабочего давления и уменьшается при его повышении.
Технические характеристики
- Ход на кулачок: 10 мм
- Закрывающее усилие: 1800 Н
- Раскрывающее усилие: 1920 Н
- Закрывающее усилие при длине кулачков 0 мм: 2000 Н
- Раскрывающее усилие при длине кулачков 0 мм: 2141 Н
- Вес: 1,41 кг
- Рекомендуемый вес заготовки: 9 кг
- Объем цилиндра за двойной ход: 120 см³
- Мин. рабочее давление: 2 бар
- Макс. рабочее давление: 8 бар
- Номинальное рабочее давление: 6 бар
- Мин. давление продувки: 0,5 бар
- Макс. давление продувки: 1 бар
- Время закрытия: 0,03 с
- Время открытия: 0,03 с
- Макс. допустимая длина пальца: 145 мм
- Макс. допустимый вес на палец: 1,1 кг
- Класс защиты IP: 40
- Мин. температура: 5 °C
- Макс. температура: 90 °C
- Точность повторения: 0,01 мм
- Диаметр: 120 мм
- Высота Z: 59,3 мм
- Момент Mx (макс.): 80 Н·м
- Момент My (макс.): 115 Н·м
- Момент Mz (макс.): 70 Н·м
- Макс. осевое усилие Fz: 2000 Н
Токарный обрабатывающий центр QT55LMY-630
Высокоточный и высокоскоростной токарно-фрезерный станок для мелких деталей сложной формы. Выполняет наружное/внутреннее точение, подточку торцов, отрезку, канавки и проточки, резьбы, фрезерование пазов, сверление и другие операции.
Особенность — горизонтальные линейные направляющие по оси Z с равномерным распределением нагрузки, что снижает износ и продлевает срок службы. Разнесение направляющих по уровням повышает жесткость станины и уменьшает вибрации.
Конструкция и оснащение
- Цельнолитая чугунная станина с наклоном 30° для жесткости и виброустойчивости
- Перемещения по осям X/Y/Z по высокоскоростным линейным направляющим качения
- Высокоскоростной прецизионный шпиндель с фланцем A2-6
- Применим для стали, чугуна и цветных металлов; подходит для высокоточной обработки
Револьверная головка BMT55
Конструкция Base Mounted Turret повышает жесткость и точность за счет крепления инструментальных блоков прямо к корпусу головки. Это снижает вибрации и улучшает качество обработки при фрезеровании и сверлении, особенно на станках с осью Y.
- До 12 инструментов (статические и приводные)
- Приводные инструменты для высокоскоростного фрезерования и сверления
- Минимальные вибрации за счет прямого крепления
Система ЧПУ FANUC 0i-TF
Система управления для многозадачной обработки (включая работу с осью Y). Поддерживает программирование и симуляцию, визуализацию обработки, интеграцию с CAD/CAM, диагностику и функции защиты (включая предотвращение аварийных ситуаций).
Параметры станка
Обработка
- Макс. устанавливаемый диаметр: 550 мм
- Макс. диаметр обработки: 380 мм
- Макс. длина обработки: 420 мм
Ходы и перемещения
- Ход по оси X: 190 + 10 мм
- Ход по оси Z: 500 мм
- Ход по оси Y: ±50 мм
- Быстрые перемещения X/Z/Y: 30 / 30 / 12 м/мин
Шпиндель
- Диаметр отверстия шпинделя: 62 мм
- Макс. диаметр прутка: 51 мм
- Конус шпинделя: A2-6
- Макс. скорость шпинделя: 4500 об/мин
- Диаметр патрона: 8"
Задняя бабка
- Тип: программируемая с сервоприводом
- Конус пиноли: MT-4
Револьверная головка
- Тип: с сервоприводом, BMT55
- Количество позиций: 12
- Макс. частота вращения: 4000 об/мин
- Диаметр расточного инструмента: 40 мм
- Сечение державки наружного инструмента: 25×25 мм
- Мощность двигателя: 2,7 кВт
Двигатели
- Двигатель шпинделя: 11 кВт
- Сервоприводы по осям X/Z/Y: 11 / 11 / 11 кВт
Точность
- Точность позиционирования: ±0,003 мм
- Точность повторного позиционирования: ±0,002 мм
Габариты и масса
- Вес станка: 5000 кг
- Габариты: 3000 × 1800 × 2150 мм
Описание технического процесса
Оператор устанавливает заготовки в накопитель на поворотном столе, выходит за световые барьеры и подтверждает загрузку.
- Если робот в домашнем положении, а противоположная сторона стола загружена и подтверждена — стол разворачивается на 180°, и робот начинает обслуживание станков.
- Если оператор загрузил детали до завершения обработки в рабочей зоне робота — стол развернется автоматически, когда робот выставит последнюю готовую деталь на стол и уйдет в домашнее положение.
- Пересечение световых барьеров сбрасывает готовность стола к развороту или прерывает разворот до подтверждения выхода оператора из зоны загрузки.
Комплектация
- Промышленный робот-манипулятор Yaskawa GP25
- Линейная ось Yaskawa Motoman
- Одноосевой поворотный стол Yaskawa Motoman VMI-400
- Контроллер Yaskawa Motoman YRC 1000 и пульт управления
- Трехкулачковый пневматический захват Schunk PZN-plus 100-1 — 2 шт.
- кулачки — 2 комплекта
- кронштейн для захватов
- Блок управления пневматикой
- Токарный центр QT55LMY (ЧПУ FANUC 0i-TF и оснащение по спецификации)
- Накопители для заготовок — 6 комплектов
- Ограждения, кабели, лотки и прочее
- Система безопасности
- Интеграция оборудования в единый комплекс (ПО, блоки управления, кабели, шланги, разъемы, кронштейны)
- пусконаладочные работы
- обучение персонала







