Обслуживание станков
- Главная
/ Обслуживание станков

24 Февраля 2024
Универсальный механообрабатывающий комплекс
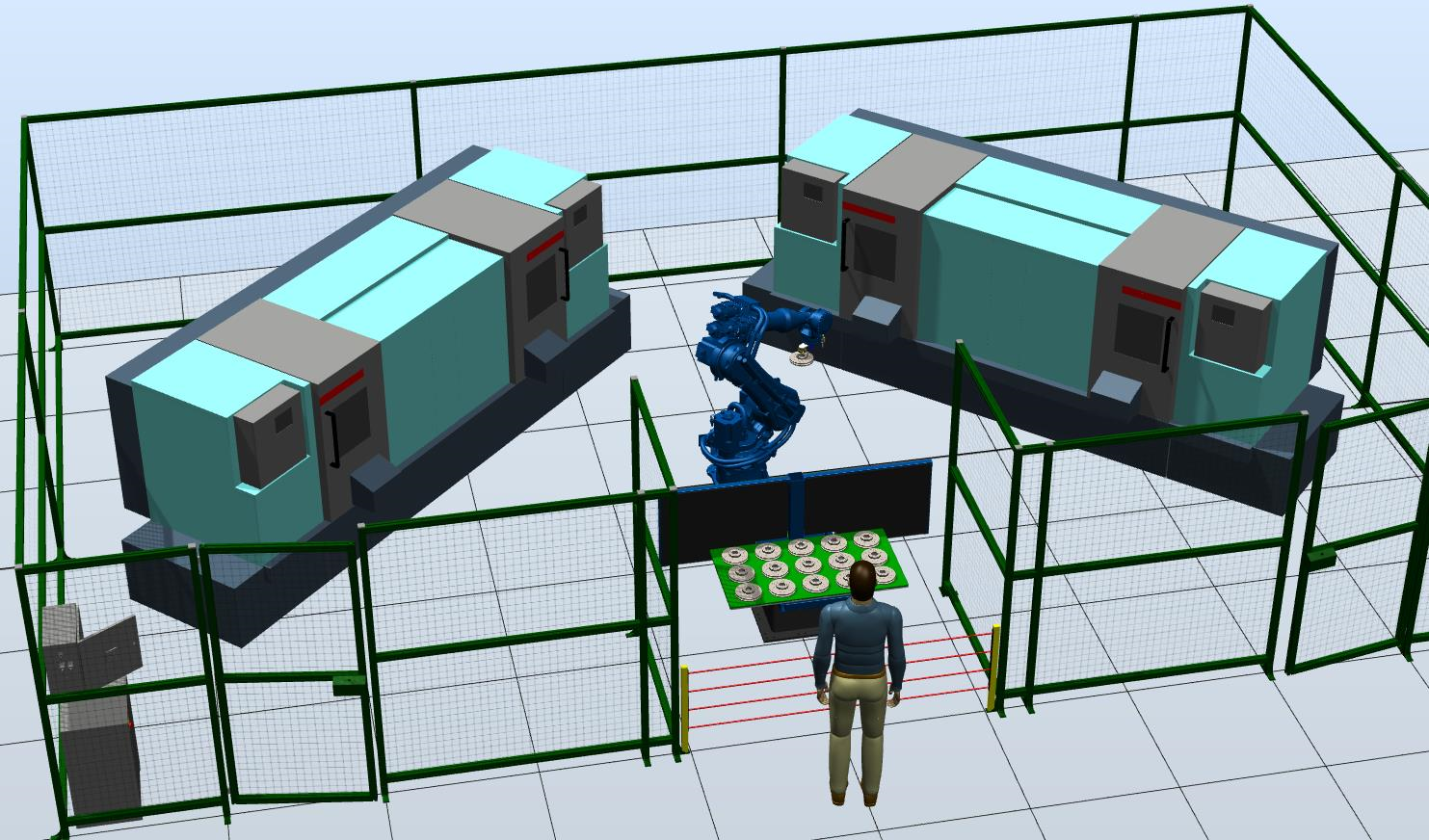
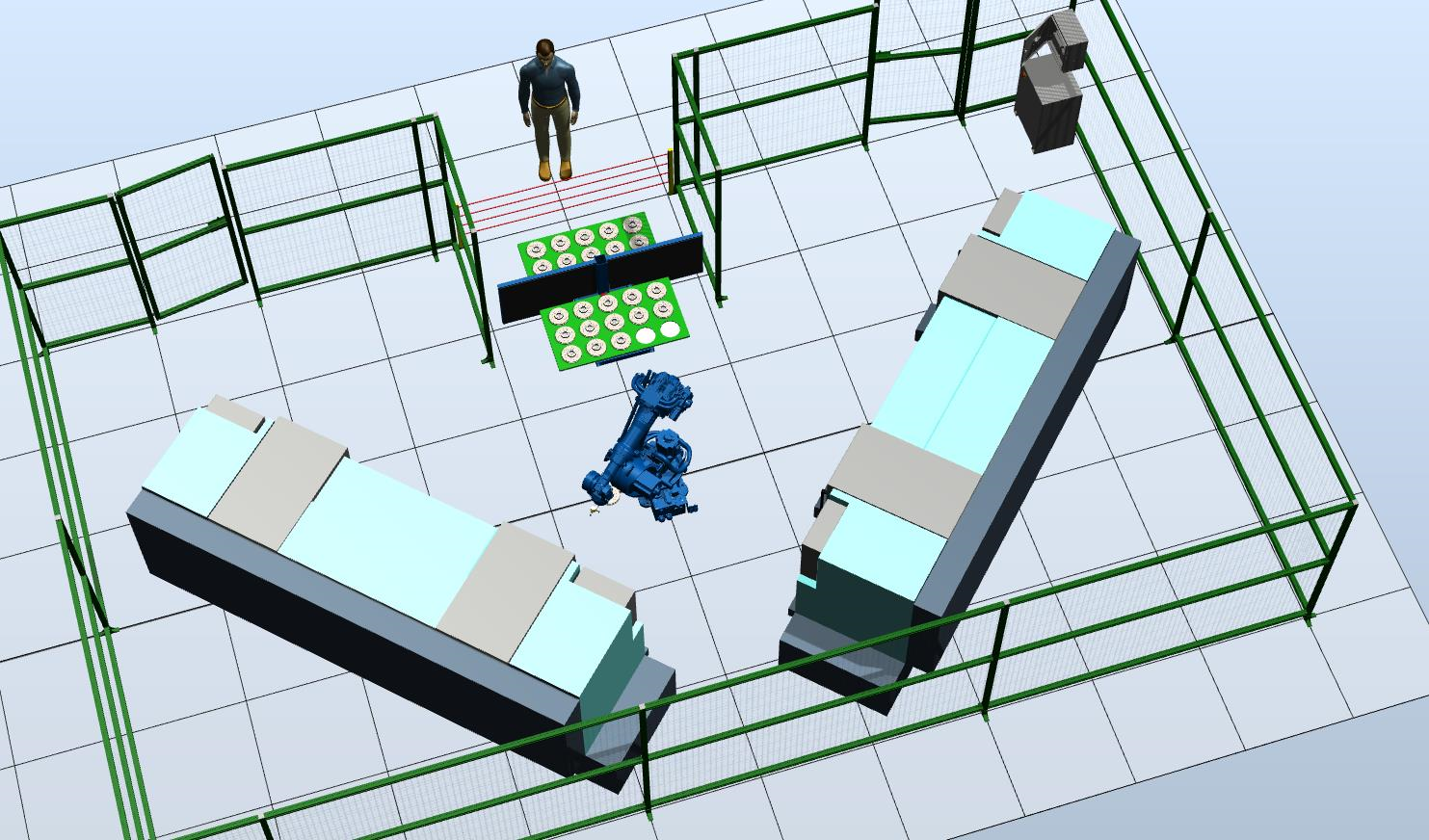
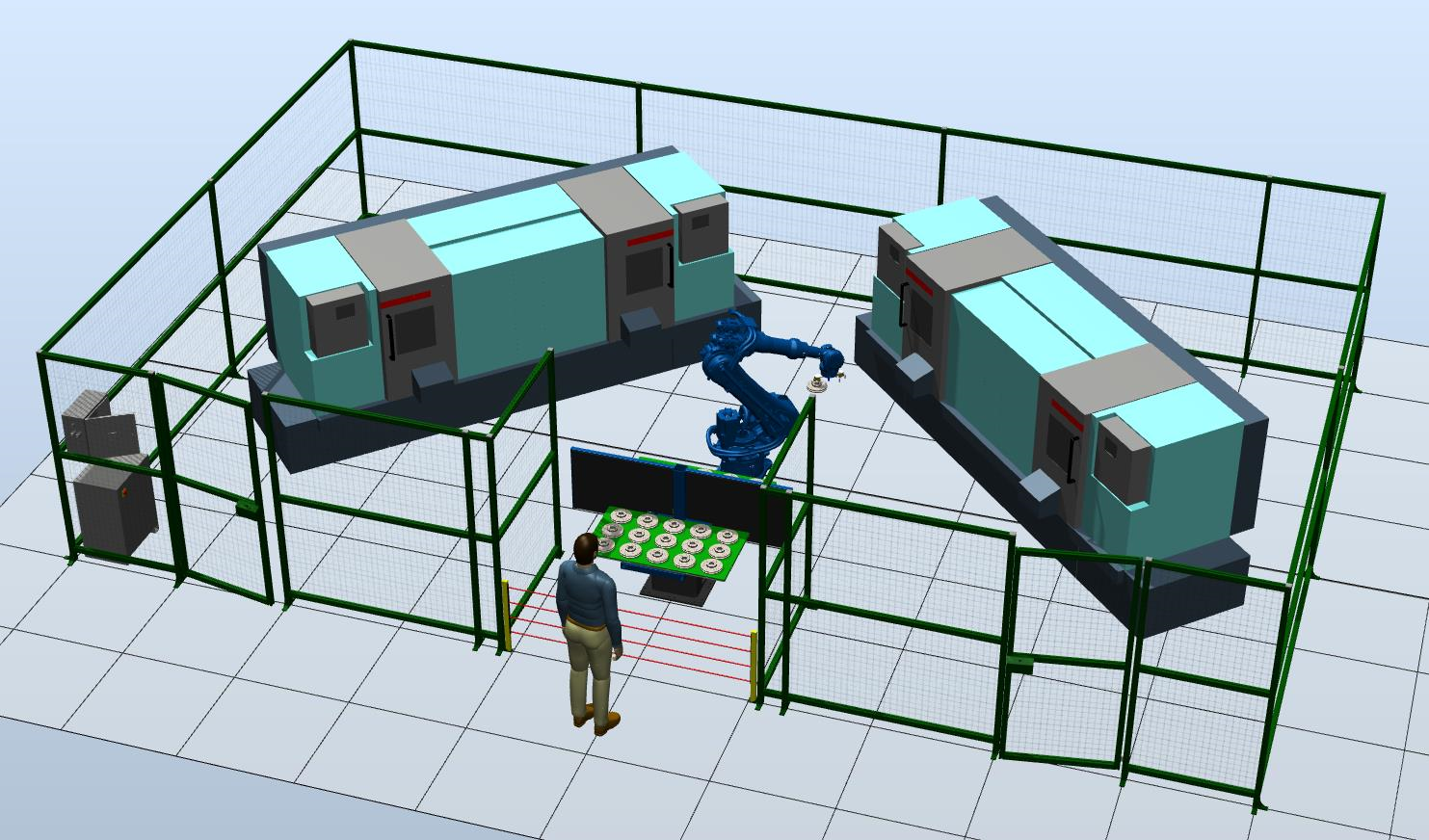
Комплекс для механообработки с роботизированной загрузкой/выгрузкой и разделением участка на две зоны: зона оператора и зона обработки.
Загрузка заготовок → Поворот стола 180° → Робот загружает станок → Перенос полуфабриката во 2-й станок → Выгрузка готовой детали → Возврат к оператору
Промышленный робот-манипулятор Yaskawa GP35L
Yaskawa GP35L — универсальный шестиосевой промышленный робот с полезной нагрузкой 35 кг, радиусом действия 2 538 мм и высокой повторяемостью ±0,07 мм.
Робот сочетает полезную нагрузку, скорость и допустимый момент на осях, что дает высокую скорость и ускорение. Компактная конструкция требует минимум места и снижает помехи для периферии.
Доступна версия со степенью защиты IP65/67 для работы в неблагоприятных условиях.
Подходит для разных задач: обработка, сборка, резка, аддитивные технологии и т.п.
Технические характеристики
- Количество осей: 6
- Максимальная грузоподъемность: 35 кг
- Повторяемость: 0,07 мм
- Досягаемость: 2 538 мм
- Рабочий температурный режим: 0º…+45ºС
- Масса: 600 кг
- Номинальная мощность: 4 кВт
Оси и скорости
- Ось S: диапазон ±180º, скорость 180º/сек
- Ось L: диапазон +135º/-90º, скорость 140º/сек
- Ось U: диапазон +206º/-80º, скорость 178º/сек
- Ось R: диапазон ±360º, скорость 250º/сек, момент 147 Н·м, инерция 10 кг/м²
- Ось B: диапазон ±125º, скорость 250º/сек, момент 147 Н·м, инерция 10 кг/м²
- Ось T: диапазон ±360º, скорость 360º/сек, инерция 4 кг/м²
Контроллер и пульт Yaskawa Motoman YRC 1000
YRC 1000 — компактная многозадачная платформа контроллера для роботов и периферии (позиционеры, линейные оси, порталы). Координирует движение до 8 роботов (главный/подчиненный) и дополнительных внешних осей (в общей сложности до 72).
Обычно комплектуется стандартным пультом: сенсорный дисплей, горячие клавиши, быстрое программирование позиций и изменение параметров. Структура программ — на базе строковых операторов. Для расширенной логики используется язык Inform III. Управление правами пользователей — через USB-носитель.
Производительность и траектория
- быстрый многозадачный процессор и современная ОС
- время загрузки: менее 40 секунд
- ARM (Advanced Robot Motion): расчет и контроль момента/нагрузки, оптимизация ускорения/скорости, устранение вибраций, быстрая коррекция целевой координаты, чувствительное обнаружение коллизий
- встроенный быстрый мягкий ПЛК для управления периферией и небольшими ячейками
Интеграция и связь
- стандартные интерфейсы (например, Ethernet, цифровые входы/выходы)
- web-доступ/мониторинг и обслуживание (в т.ч. FTP)
- поддержка интерфейсов цифровой фабрики, включая OPC/UA (в т.ч. VDMA Robotics Companion Specification)
- поддержка распространенных промышленных шин и протоколов (Profinet, DeviceNet, Profibus, Ethernet/IP, ModbusTCP, CCLink, EtherCAT и др., включая варианты safety)
- интеграция с периферией: захваты, 2D/3D-зрение, датчики силы/момента, HMI и т.п.
Методы программирования (как в исходнике, кратко)
- стандартный обучающий пульт (сенсорный), Smart Pendant
- Motologix (IEC 61131) для интеграции в ПЛК-среды
- программирование с ПК
- offline-моделирование MotoSimVRC и сторонние OLP / Digital Twin
- мастера/приложения (Welding Wizard, PalletSolver, Motologix)
- CAD/CAM через постпроцессоры (G-code)
- ROS и сторонние среды
- API/SDK (Motoplus C/C++, MotoCom32 SDK), Matlab/LabView и др.
- 2D/3D машинное зрение, подбор контейнеров, ИИ/нейросети
- аппаратные устройства обучения (ручки/перчатки), HMI/визуализации
Одноосевой поворотный стол Yaskawa VMI-400
Двухпозиционный поворотный стол с сервоприводом и защитным экраном для перемещения деталей в рабочую зону. Сделан для удобства оператора и имеет подходящую рабочую высоту.
Характеристики
- Номинальная полезная нагрузка: 400 кг
- Высота загрузки: 675 мм
- Вес: 323 кг
Токарный обрабатывающий центр HT5D-L с ЧПУ Fanuc 0i-TF
Общие технические характеристики
- Конус шпинделя: FL140h5 / A2-6
- Максимальные обороты шпинделя: 4500 об/мин
- Максимальный крутящий момент: 112 Н·м
- Мощность привода главного шпинделя: 11–15 кВт
- Диаметр патрона: 210 мм
- Отверстие шпинделя: 74 мм
- Диаметр подшипника: 100 мм
Рабочая зона
- Максимальный диаметр заготовки над станиной: 576 мм
- Максимальный диаметр обработки: 390 мм
- Максимальная длина обработки: 500 мм
- Максимальный диаметр прутка: 51 мм
- Перемещение по оси Z: 525 мм
- Перемещение по оси X: 225 мм
- Перемещение по оси Y: ±35 мм
- Z/X ШВП DxP: 32 × 10 мм
Ускоренные подачи по осям
- Ускоренная подача Z: 24 м/мин
- Ускоренная подача X: 24 м/мин
- Ускоренная подача Y: 12 м/мин
- Усилие подачи X/Z: 7500 Н
- Количество осей: 4
Точностные характеристики (VDI/DGQ 3441)
- Точность позиционирования (X/Y/Z): 0,008 / 0,008 мм
- Повторяемость позиционирования (X/Y/Z): 0,004 / 0,005 мм
Инструмент
- Револьверная головка: BMT55
- Количество инструментов: 12
- Размер державки инструмента: 25 мм
- Максимальный Ø расточного инструмента: 40 мм
- Максимальные обороты приводного инструмента: 3000 об/мин
- Мощность привода: 3 кВт
- Максимальный крутящий момент приводимого инструмента: 45 Н·м
Электротехнические характеристики
- Напряжение: 380 ±10% В
- Частота: 50 ±1% Гц
- Максимальная потребляемая мощность: 50 кВт
Гидравлический узел
- Максимальное рабочее давление: 40 бар
- Емкость резервуара: 35 л
- Расход насоса: 24 л/мин
Система охлаждения
- Общая вместимость: 180 л
- Подача насоса: 30 л/мин
- Давление насоса: 5 бар
Базовая конфигурация (как в исходнике)
- Система управления: Fanuc (Япония)
- Револьверная головка: Pragati (Индия)
- ШВП: THK (Япония) / PMI (Тайвань)
- Линейные направляющие: THK (Япония) / PMI (Тайвань)
- Подшипники шпинделя и ШВП: NSK (Япония)
- Зажимной патрон и пиноль: Autogrip (Тайвань)
- Гидравлическая система: Seven ocean (Тайвань)
- Система охлаждения: STAIRS (Тайвань)
- Транспортер для стружки: Domestic (Китай)
Габариты и масса
- Требуемая площадь (с конвейером): 5050 × 1900 × 2050 мм
- Вес: 7800 кг
Описание технологического процесса
Участок состоит из двух зон, разделенных поворотным столом: зона оператора и зона механообработки.
Оператор загружает заготовки в гравитационный накопитель, установленный на поворотном столе, подтверждает загрузку, и стол выполняет разворот на 180°.
Далее робот с пневмомеханическим захватом:
- забирает заготовку и устанавливает ее в гидравлический патрон первого станка
- после обработки забирает полуфабрикат и переносит его во второй токарный станок
- затем снова идет к накопителю за следующей заготовкой и устанавливает ее в первый станок
- готовую деталь выгружает из второго станка на поворотный стол
Когда все заготовки из накопителя обработаны и возвращены роботом обратно в слоты накопителя, поворотный стол снова разворачивается на 180°: готовые детали оказываются перед оператором, а заготовки — снова в зоне обработки.
Цены и комплектация (без таблиц, как в исходнике)
-
Промышленный робот-манипулятор Yaskawa GP35L — 1 шт.
Поворотный стол Yaskawa Motoman VMI-400 — 1 шт.
Контроллеры Yaskawa Motoman YRC 1000 — 21 шт.
Тумба для установки робота — 1 шт.
Цена: 444 639 € (включая НДС 20%) -
Пневмомеханические захваты — 1 шт.
-
Токарный обрабатывающий центр HT5D-L с ЧПУ Fanuc 0i-TF — 2 шт.
- 12-позиционная револьверная голова SAUTER — 2 шт.
- 10" патрон шпинделя — 2 шт.
- 8" патрон противошпинделя — 2 шт.
- уловитель масляного тумана — 2 шт.
- сепаратор СОЖ — 2 шт.
-
Renishaw TS27R — система измерения и контроля инструмента — 2 шт.
-
Шкаф управления пневматикой — 1 шт.
-
ПЛК для управления линией — 1 шт.
-
Конвейер для удаления стружки (ленточный) — 2 шт.
-
Подача СОЖ высокого давления через шпиндель — 2 шт.
-
Комплект режущего инструмента — 10 шт.
-
Комплект оснастки для режущего инструмента — 10 шт.
-
Система безопасности
-
Защитные ограждения
-
Интеграция оборудования в единый комплекс (микроконтроллеры, блоки управления, кабели, шланги, разъемы, кронштейны, система безопасности)
- пусконаладочные работы на территории заказчика
- обучение персонала
Общая стоимость: 444 639 € (включая НДС 20%) *







