Обслуживание станков
- Главная
/ Обслуживание станков

07 Апреля 2025
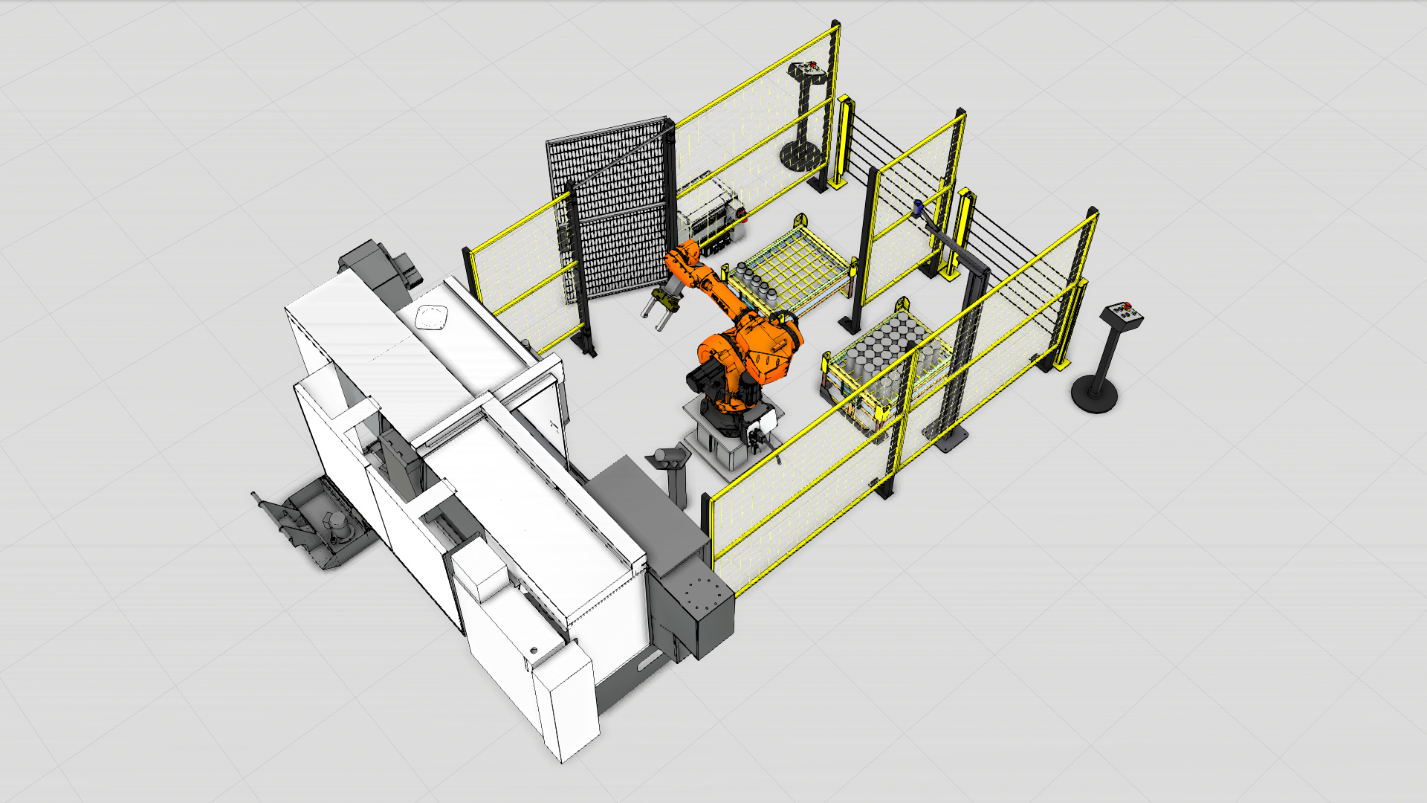
Роботизированный комплекс загрузки-разгрузки заготовок
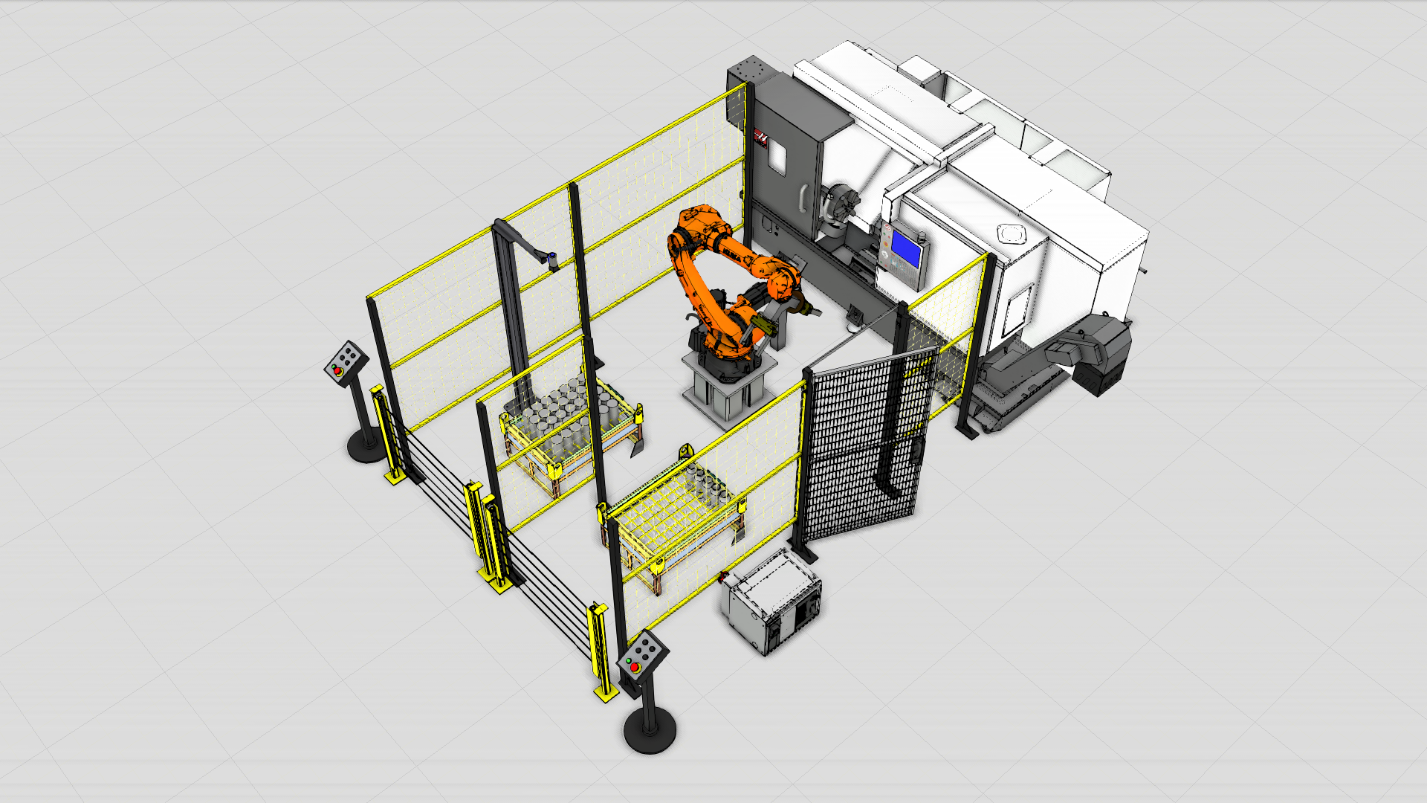
Комплекс для автоматизации загрузки и выгрузки заготовок с применением промышленного робота, 3D-сканера для уточнения положения детали и пневматического захвата.
Подача заготовки → 3D-сканирование → Коррекция траектории → Захват → Перенос/установка → Возврат в исходное положение
Промышленный робот KUKA KR 70 R2100
Шестиосевой промышленный робот для перемещения заготовок и обслуживания оборудования.
Технические характеристики
- Количество осей: 6
- Номинальная грузоподъёмность: 70 кг
- Максимальная досягаемость: 2101 мм
- Повторяемость: ±0,04 мм
- Установленная мощность: 4,7 кВА
- Масса робота: 564,4 кг
- Степень защиты: IP65 (манипулятор), IP67 (запястье)
Контроллер KUKA KR C4
Контроллер для управления роботом и периферией комплекса (датчики, захват, логика, безопасность). Поддерживает промышленную интеграцию через I/O и сетевые интерфейсы.
Захват
Пневматический параллельный захват для надёжного удержания заготовки в цикле перемещения. Исполнение подбирается под геометрию и массу детали.
3D-сканер Cognex
3D-сканер предназначен для определения положения заготовки перед захватом и компенсации смещения/поворота детали при подаче.
Технические характеристики
- Питание: 24 DC
- Потребляемая мощность: 20 Вт
- Степень защиты: IP67
- Поле сканирования: 256×206 мм
- Рабочее расстояние: 500…1500 мм
- Точность: 0,5 мм
- Разрешение: 1280×1024 пикс.
- Масса: 3,4 кг
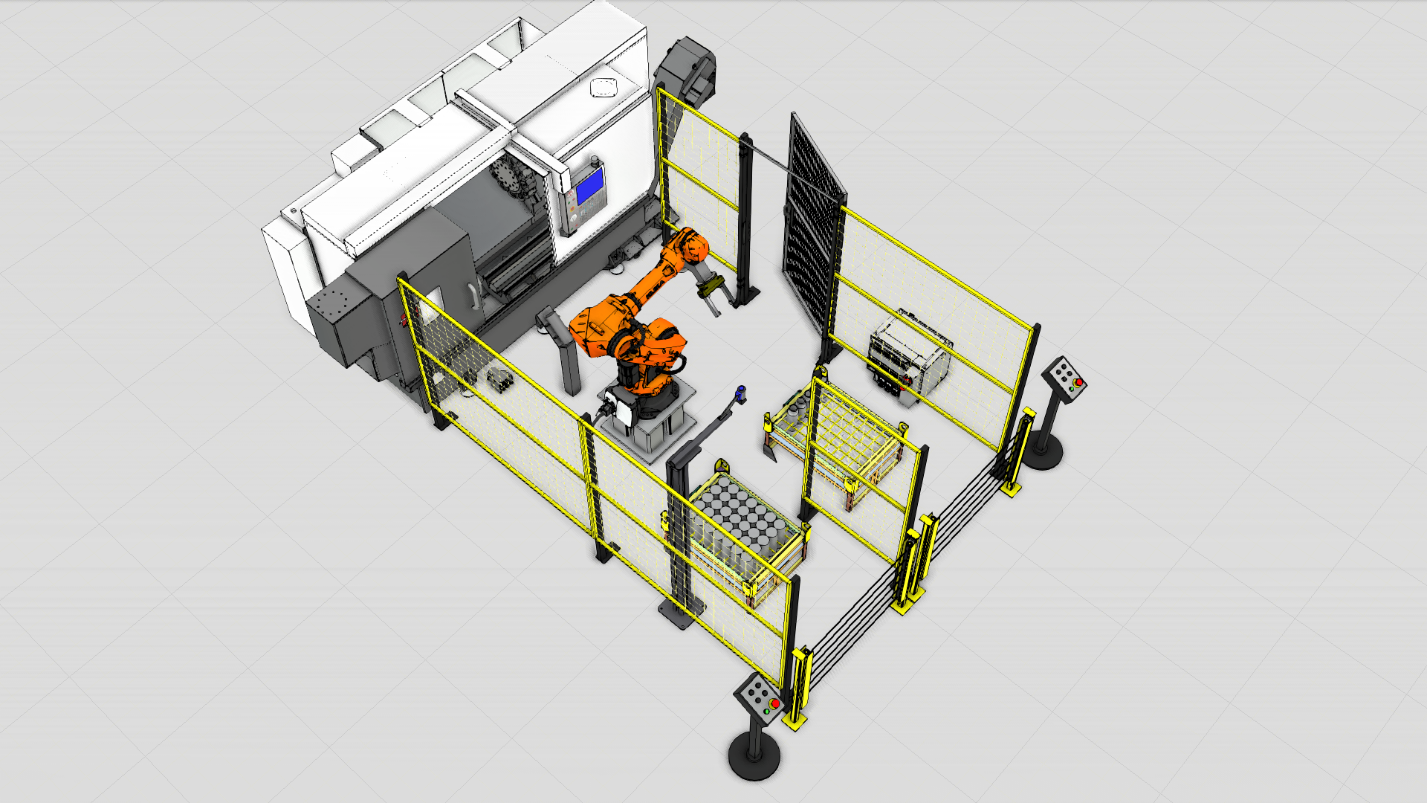
Процесс
Заготовка подаётся в зону обслуживания робота. 3D-сканер измеряет фактическое положение детали. Система управления рассчитывает корректировку (включая поворот детали в пределах допусков подачи) и передаёт роботу обновлённые целевые координаты. Робот захватывает заготовку и выполняет загрузку/выгрузку по программе.
Цены и комплектация
- Комплекс загрузки-разгрузки заготовок (KR 70, 3D-сканер, захват, шкаф управления, безопасность, интеграция) — 1 034 819,23 ¥ (включая НДС 22%)
- Промышленный робот, контроллер
- Захват
- 3D-сканер
- Шкаф управления
- Защитные ограждения и система безопасности
- Интеграция, кабели, шланги, разъёмы, кронштейны, ПНР, обучение
Общая стоимость комплекса: 1 034 819,23 ¥ (включая НДС 22%)







