Новости и события


19 Августа 2025
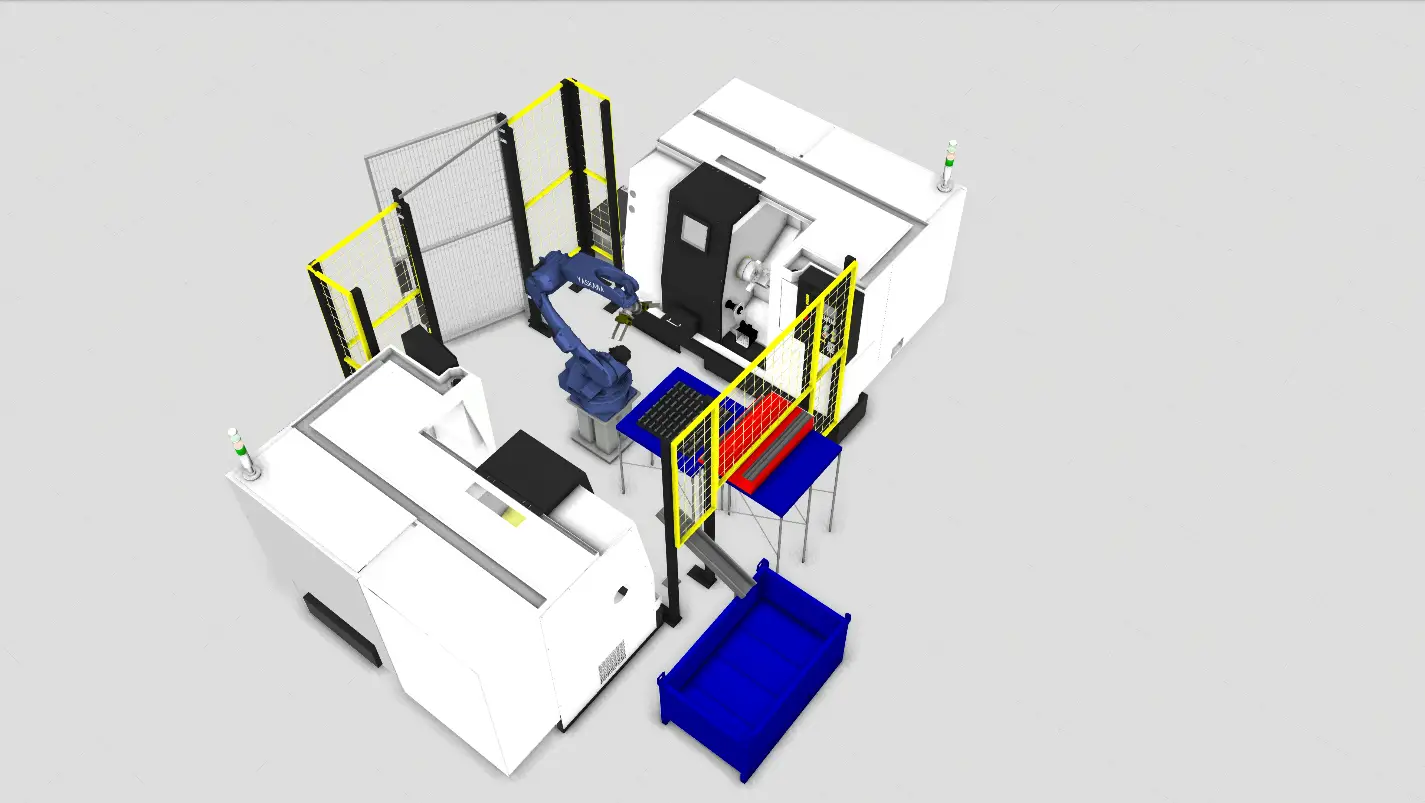
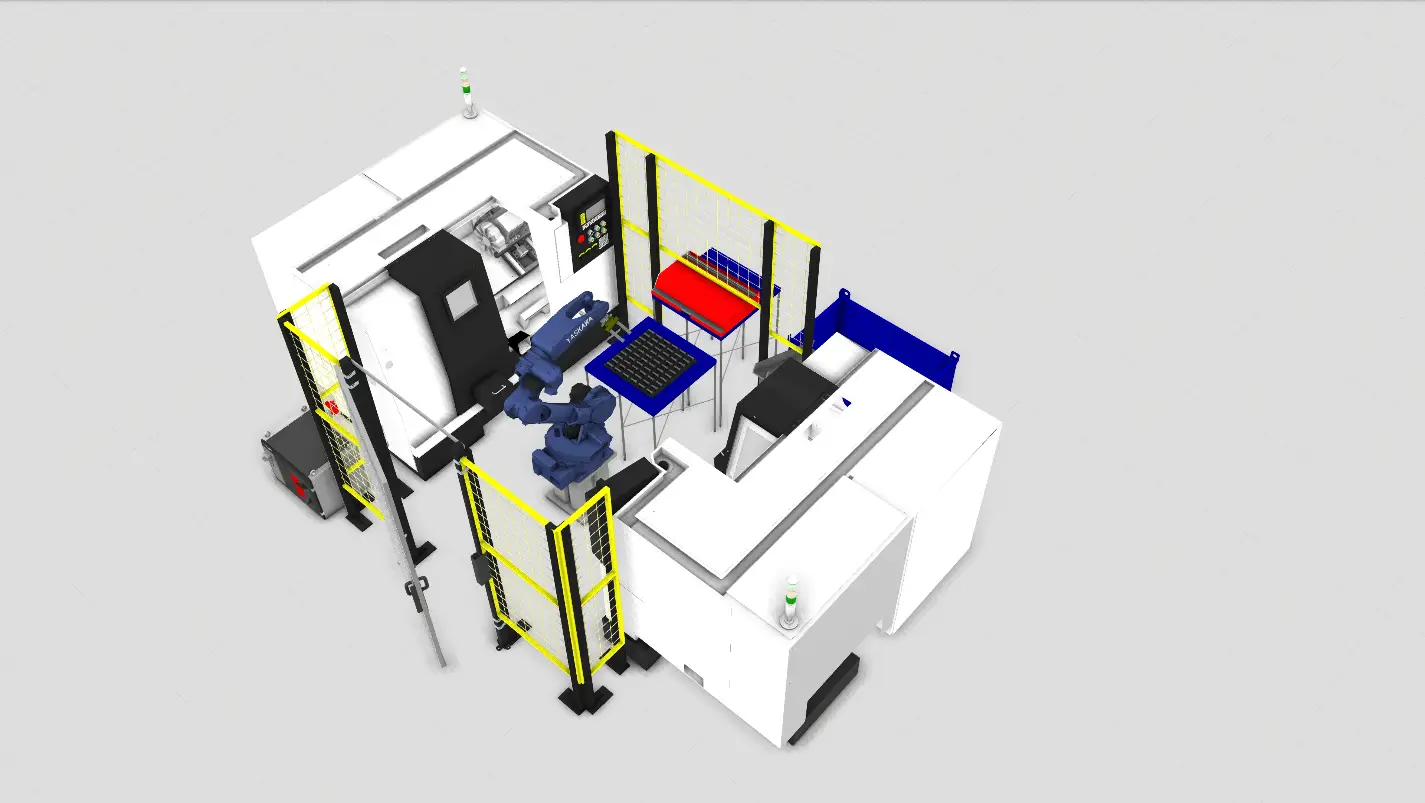
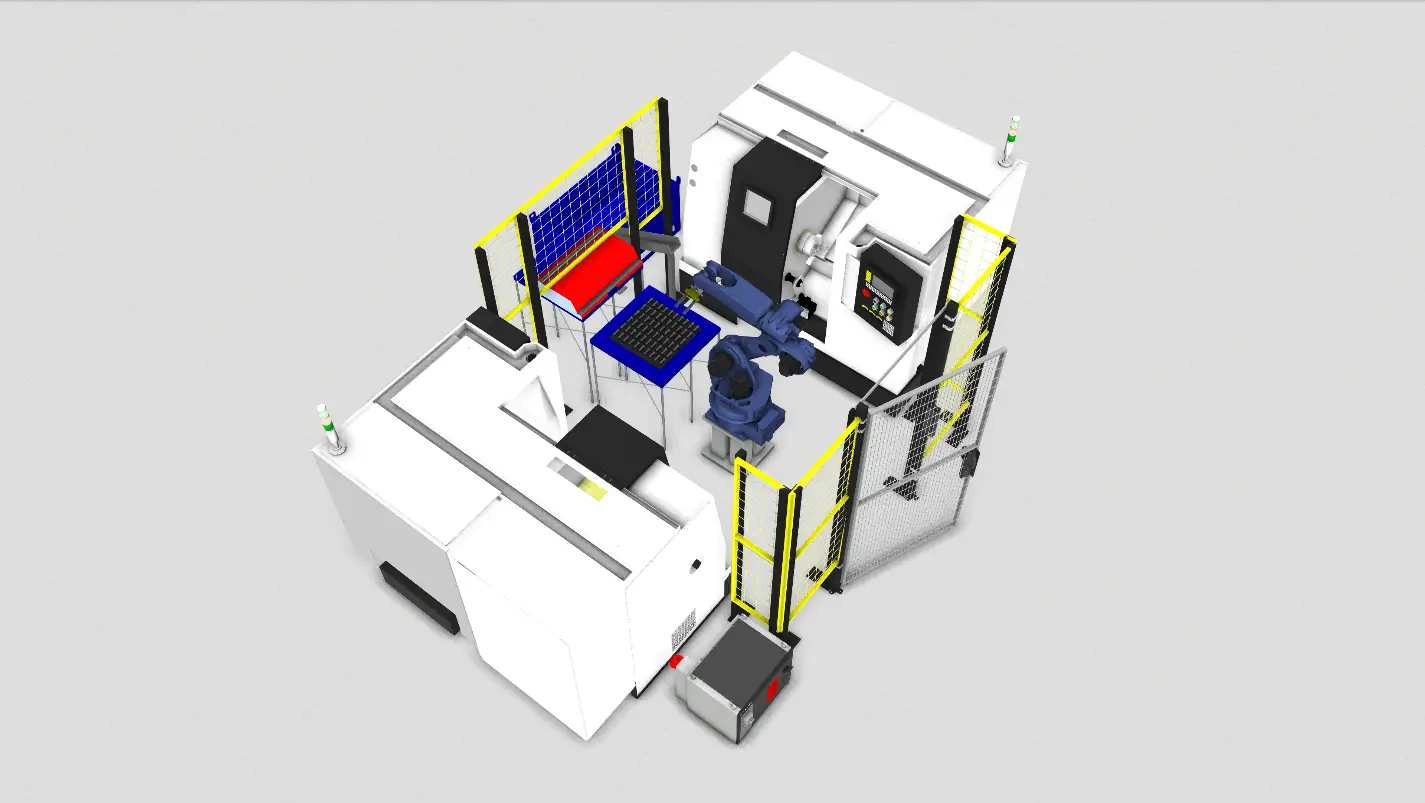
Роботизированный комплекс загрузки-разгрузки
РТК — огороженная ячейка из двух станков, обслуживаемых промышленным роботом. Оператор загружает заготовки в накопитель, а готовые детали сбрасываются на склиз и попадают в тару.
Загрузка в накопитель → Робот обслуживает станки → Сброс готовых деталей на склиз → Сигнал о дозагрузке → Дозагрузка без остановки
Промышленный шестиосевой робот Yaskawa Motoman GP25
Yaskawa Motoman GP25 — универсальный шестиосевой промышленный робот с полезной нагрузкой до 25 кг и радиусом действия 1730 мм. Подходит для коротких циклов и стабильной повторяемости.
Компактный дизайн позволяет использовать робота для обработки заготовок, загрузки/разгрузки станков и похожих задач. Запястье с защитой IP67 подходит для мехобработки или шлифования.
Технические характеристики
- Количество осей: 6
- Максимальная грузоподъемность: 25 кг
- Повторяемость: 0,03 мм
- Максимальная досягаемость: 1730 мм
- Температурный режим: 0º…+45ºC
- Допустимая влажность: 20–80%
- Масса: 250 кг
- Номинальная мощность: 2 кВт
Оси и скорости
- Ось S: диапазон ±180º, скорость 210º/сек
- Ось L: диапазон +155º/-105º, скорость 210º/сек
- Ось U: диапазон +160º/-86º, скорость 265º/сек
- Ось R: диапазон ±200º, скорость 420º/сек, момент 52 Н·м, инерция 2,3 кг/м²
- Ось B: диапазон ±150º, скорость 420º/сек, момент 52 Н·м, инерция 2,3 кг/м²
- Ось T: диапазон ±455º, скорость 885º/сек, момент 32 Н·м, инерция 1,2 кг/м²
Контроллер и пульт Yaskawa Motoman YRC 1000
YRC 1000 — компактная многозадачная платформа контроллера для роботов и периферии (позиционеры, линейные оси, порталы), которая может координировать до 8 роботов и дополнительных внешних осей (в сумме до 72).
Обычно используется стандартный пульт программирования с сенсорным экраном и горячими клавишами: он ускоряет обучение точек, настройку позиций и изменение параметров. Для расширенной логики применяется язык высокого уровня Inform III. Управление правами пользователей — через USB.
Производительность и траектория
- Время загрузки: менее 40 секунд
- ARM (Advanced Robot Motion): расчет и контроль нагрузки/момента, оптимизация ускорений и скорости, подавление вибраций, быстрая коррекция целевой позиции, обнаружение коллизий
- Встроенный мягкий ПЛК: управление периферией и небольшими ячейками, в простых решениях может заменить отдельный ПЛК ячейки
Интеграция и связь
- стандартные интерфейсы (в т.ч. Ethernet, цифровые I/O)
- удаленный мониторинг и обслуживание через web/FTP
- поддержка OPC/UA и промышленных шин (Profinet, DeviceNet, Profibus, Ethernet/IP, ModbusTCP, CCLink, EtherCAT и др., включая safety-варианты)
- подключение периферии: захваты, 2D/3D-зрение, датчики силы/момента, HMI и т.п.
Методы программирования и инструменты (по смыслу исходника)
- стандартный сенсорный обучающий пульт / Smart Pendant
- Motologix (IEC 61131) для интеграции программирования в ПЛК-среды
- программирование с ПК
- offline-моделирование MotoSimVRC и сторонние OLP / Digital Twin
- мастера/приложения (например, Welding Wizard, PalletSolver)
- CAD/CAM через постпроцессоры (G-code)
- ROS, сторонние среды программирования
- API/SDK (Motoplus C/C++, MotoCom32 SDK), научные среды (Matlab/LabView)
- машинное зрение, подбор контейнеров, функции ИИ/нейросети
- обучающие устройства (ручки/перчатки), кастомные HMI/визуализации
Пневматический захват Schunk PGN-plus-P 100-1
Параллельный пневматический захват с высоким усилием, рассчитанный на заметные моменты и длительную работу. Механизм смазки продуман за счет смазочных пазов в многореберной направляющей.
Технические характеристики
- Ход на кулачок: 10 мм
- Сила закрытия: 870 Н
- Сила открытия: 930 Н
- Сила закрытия при длине пальцев 0 мм: 930 Н
- Сила открытия при длине пальцев 0 мм: 1000 Н
- Вес: 0,9 кг
- Рекомендованный вес заготовки: 4,35 кг
- Объем цилиндра за двойной ход: 55 см³
- Мин. рабочее давление: 2,5 бар
- Макс. рабочее давление: 8,0 бар
- Номинальное рабочее давление: 6,0 бар
- Мин. давление продувки воздухом: 0,5 бар
- Макс. давление продувки воздухом: 1,0 бар
- Время закрытия: 0,06 сек
- Время открытия: 0,06 сек
- Макс. допустимая длина пальца: 160 мм
- Макс. допустимый вес на палец: 1,3 кг
- Класс защиты IP: 40
- Мин. температура окружающей среды: 5°C
- Макс. температура окружающей среды: 90°C
- Точность повторения: 0,01 мм
- Класс чистого помещения (ISO 14644-1): 5
- Момент Mx (макс.): 87 Н·м
- Момент My (макс.): 115 Н·м
- Момент Mz (макс.): 80 Н·м
- Макс. осевая сила Fz (макс.): 2700 Н
Оптический датчик Renishaw OLP-40
Компактный контактный триггерный 3D-датчик с оптической передачей сигнала. Используется для установки заготовки и контроля обработки на небольших и средних обрабатывающих центрах.
Особенности и преимущества
- кинематическая конструкция, проверенная практикой
- защита от световых помех и модулированный оптический сигнал
- прием и передача сигналов в пределах 360°
- сверхкомпактная конструкция
- повторяемость: 1 мкм (2σ)
- совместимые приемники/интерфейсы: OMI-2, OMI-2C, OMI-2T, OSI с OMM-2
Описание техпроцесса
РТК — огороженная ячейка, состоящая из двух станков, обслуживаемых промышленным роботом.
Оператор:
- устанавливает заготовки в накопитель
- подтверждает загрузку
Далее комплекс работает автоматически:
- робот выполняет загрузку/выгрузку станков по циклу
- готовые изделия сбрасываются на склиз и попадают в тару
- после изготовления заданного количества деталей на световой стойке загорается сигнал — это означает, что нужно добавить заготовки в накопитель
- дозагрузка накопителя не требует остановки комплекса
Цены и комплектация
- Промышленный робот Yaskawa GP25 — 8 934 231 руб. (включая НДС 20%)
- Пневматический захват Schunk PGN-plus-P 100-1 — 2 комплекта
- Оптический датчик Renishaw OLP-40 — 2 комплекта
- Система обдува
- Кронштейн для захватов
- Кулачки для захватов — 2 комплекта
- Блок управления пневматикой
- Склиз
- Тумба для робота
- Ограждения
- Система безопасности
- Интеграция оборудования в единый комплекс, включая необходимые кабели, шланги, разъемы и кронштейны
- обучение персонала





